Активные распределительные электрические сети
Активные распределительные электрические сети с децентрализованным мультиагентным управлением режимом
ФИШОВ А.Г.,СИНЦЕВ А.А.,КАКОША Ю.В.,ОДИНАБЕКОВ М.З.
НГТУ,Новосибирск,Россия
Ключевые слова: активная распределенная электрическая сеть, мультиагентная система управления режимом, восстановление целостности сети, синхронизация Минигрид.
Введение
Множество причин определяет масштабное развитие малой генерации и объектов на ее основе, работающих как в составе электрических сетей существующих энергосистем, так и в удаленных районах, образующих изолированные энергосистемы малой мощности.
К числу таких причин следует отнести стремление крупных потребителей к энергетической независимости и безопасности, ограничения на подключение новых нагрузок в узлах сети с запертыми мощностями, желание развивать периферийные зоны крупных агломераций с малой плотностью населения и большой удаленностью от существующих источников тепловой и электрической мощности, развитие удаленных территорий с экономической нецелесообразностью сооружения протяженных электрических связей с сетями централизованного энергоснабжения.
Сооружаемая малая генерация и объекты на ее основе (локальные интеллектуальные энергосистемы малой мощности, активные энергетические комплексы, Мини- и Микрогриды) интегрируются в существующие распределительные электрические сети или образуют новые электрические сети с распределенной малой генерацией, работающие изолированно или преимущественно изолированно. Такие сети при насыщении их множеством объектов с малой генерацией превращаются, в так называемые, активные электрические сети, представляющие собой энергосистемы нового типа, хотя и относительно малой мощности, но с большим количеством распределенной генерации. Их особенность заключается не только в специфике и разнообразии используемого генерирующего оборудования, экономической и технической нецелесообразности использования “классических” технологий и систем управления режимами, но и в многообразии интересов собственников оборудования по его использованию при осуществлении общего электрического режима, участии в различных системных услугах, обеспечивающих качество и надежность энергоснабжения потребителей.
Перспективным для таких объектов становится отказ от централизованного режимного и противоаварийного управления с переходом к децентрализованному мультиагентному, не использующему иерархию, предоставляющему большую свободу в принятии решений для достижения собственных целей при осуществлении общего режима сети. Техническим преимуществом децентрализованного управления является отсутствие необходимости в развитой телекоммуникационной сети, специализированных дорогостоящих центров диспетчерского управления, централизованных систем противоаварийного управления.
Целью настоящей статьи является представление возможностей создания и формирование образа децентрализованной мультиагентной системы управления режимами активных электрических сетей с множеством распределенной по сети генерацией и объектов на ее основе.
В работе в фокусах децентрализации и мультиагентного автоматического управления рассматриваются основные системные задачи управления общим режимом электрической сети с распределенной генерацией:
- Поддержание баланса активной мощности (регулирование частоты) в нормальных режимах;
- Поддержание баланса реактивной мощности (регулирование напряжения) в нормальных режимах;
- Противоаварийное управление при больших возмущениях нормального режима;
- Сохранение работоспособности системы энергоснабжения в послеаварийных режимах;
- Восстановление целостности и нормального режима сети после ее аварийного или противоаварийного распада на части.
Следует отметить, что по сути речь идет о технологии децентрализованного управления режимами электрических сетей с распределенной малой генерацией, причем уже частично реализованной на действующих объектах, а также в полном объеме проверенной на физических электродинамических моделях энергосистем НГТУ и МЭИ.
Для однозначности восприятия материала следует представить основные термины, определяющие его содержание:
Активная электрическая сеть с распределенной (малой) генерацией – распределительная электрическая сеть с множеством источников и объектом с источниками электрической энергии малой мощности, включенных в разных узлах сети.
Агент (обобщённо) — сущность (лицо, автоматика и пр.), действующая по поручению (в интересах и по правилам) какого-либо субъекта (организации, предприятия и пр.).
Мультиагентная (Многоагентная) система управления (МАС, англ. — Multi-agent system, МАS), система управления, функционирующая путем взаимодействия интеллектуальных агентов.
Моно мультиагентная система управления (ММАS) — система управления, функционирующая путем взаимодействия интеллектуальных агентов одного субъекта, действующих в его интересах и по его правилам.
Поли мультиагентная система управления (РМАS) — система управления, функционирующая путем взаимодействия интеллектуальных агентов множества субъектов, действующих в их интересах, но по общим правилам.
Децентрализованная мультиагентная система управления (DMAS) - мультиагентная система управления, функционирующая путем взаимодействия интеллектуальных агентов одного уровня, использующих локальную информацию о состоянии объекта управления
При построении децентрализованной МАС управления режимами электроэнергетических систем в качестве аксиом следует принять ряд принципов:
- Самостоятельности принятия решений каждым агентом в пределах его полномочий и общих правил поведения;
- Максимального использования каждым агентом локальной информации о состоянии управляемой системы (режиме электроэнергетической системы) при принятии решений;
- Приоритетности критериев принятия решений и действий агентов по восстановлению нормального режима управляемой системы после его нарушения;
- Ограниченности свободы действий (принятия решений по управлению) в нормальных режимах созданием нарушений нормального режима и условий невозможности эффективных действий смежных по областям влияния агентов;
- Единства и обязательности соблюдения общих правил принятия решений и действий агентов.
1. Субъекты системы мультиагентного управления режимами электрических сетей с распределенной генерацией
Субъектами МАС управления режимами электрической сети являются собственники средств управления режимом электрической сети по активной и реактивной мощностям, определяющие цели своих агентов. Агентами субъектом являются устройства управления активной и реактивной мощностью.
Таким образом субъектами являются сетевые компании, потребители электрической энергии, располагающие средствами управления активной и реактивной мощностью, включая активные энергетические комплексы (АЭК), а также электростанции малой мощности и локальные системы энергоснабжения, созданные на основе малой генерации, интегрированные в общую электрическую сеть.
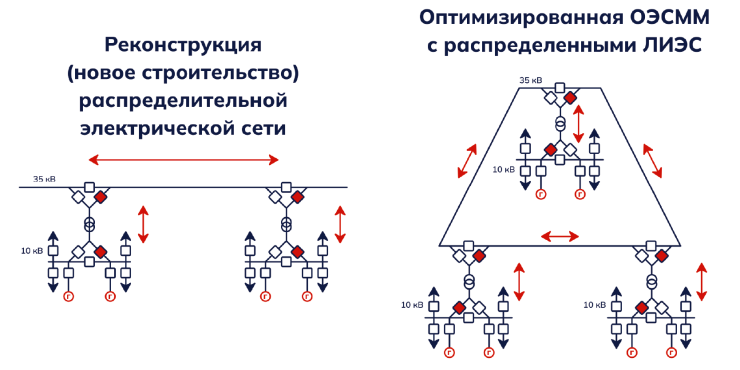
Особо следует выделить локальные интеллектуальные энергосистемы (ЛИЭС или Минигриды), обладающие сбалансированностью по мощности и способные работать как автономно, так и параллельно с внешней электрической сетью, не создавая угроз нарушения устойчивости параллельной работы и аварийных небалансов мощности для внешней электрической сети [1].
Технология таких Минигридов и ее пилотная реализация представлены в работах [2].
2. Мультиагентное децентрализованное регулирование частоты в электрической сети с распределенной генерацией
В данном разделе рассматривается децентрализованное мультиагентное регулирование частоты в сбалансированной островной или временно работающей в изолированном режиме электрической сети с распределенной малой генерацией. Участниками регулирования частоты являются интегрированные агенты интегрированных в сеть электростанций и локальных энергосистем энергоснабжения на основе малой генерации.
Хорошо известны способы централизованного регулирования частоты в энергосистемах, основанные на использовании первичного, вторичного и третичного регулирования частоты:
- С одной ведущей по частоте электростанцией вторичного регулирования и, при необходимости, участия одной или нескольких других электростанций во вторичном регулировании на принципе долевого участия в мощности ведущей по частоте электростанции [3]. При этом работоспособность системы в целом обеспечивается централизованным диспетчерским управлением, осуществляющим функционализацию электростанций для регулирования частоты в энергосистеме и поддержание требуемых для его осуществления резервов;
- С множеством регулирующих сальдо перетоки мощности в областях регулирования электростанций, в каждой из которых система вторичного регулирования является централизованной, т.к. контролирует перетоки мощности на границах области, а работоспособность также обеспечивается диспетчерским управлением в этой области [4].
Задачей мультиагентного способа является децентрализация и упрощение системы регулирования частоты и мощности в энергосистемах, повышение надежности ее работы.
Рассмотрим возможность решения такой задачи на основе общих принципов построения децентрализованной МАС.
В мультиагентном способе решения об участии в осуществлении вторичного регулирования, коррекции мощности для восстановления резервов вторичного регулирования и разрешении на изменение мощности электростанции принимаются локальным устройством управления (контроллером), расположенным непосредственно на самой электростанции. При этом для работы этого устройства на нем создаются фиксированные по времени и синхронизированные для всех таких устройств на электростанциях энергосистемы такты времени двойной продолжительности по отношению ко времени ввода резервов вторичного регулирования. На каждом такте времени контроллер по характеру изменения частоты в энергосистеме идентифицирует класс состояния системы регулирования частоты из заданного множества, используя для этого условия принадлежности к тому или иному классу с учетом текущего и предшествующих классов, и самостоятельно принимает решения о характере участия в регулировании частоты на основании общих для всех электростанций правил.
На (рис. 1) приведен пример схемы электрической сети с тремя электростанциями и контроллерами, представляющий реализацию предлагаемого способа.
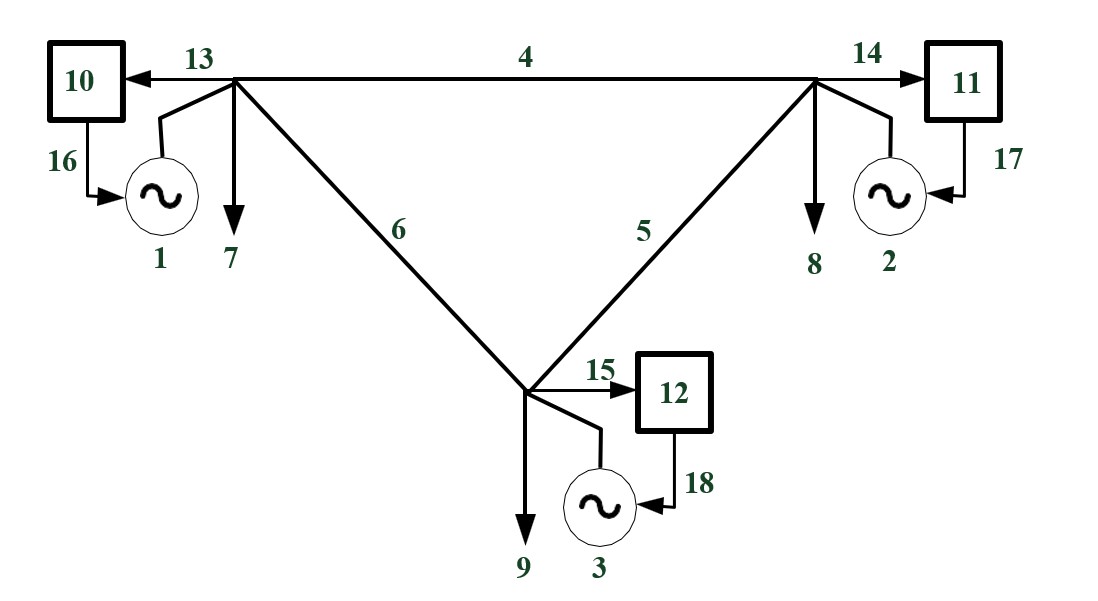
1,2,3 – генераторы энергоблоков электростанций, 4,5,6 – линии электропередачи, образующие электрическую сеть, 7,8,9 – нагрузки в узлах электрической сети, 10,11,12 – интеллектуальные контроллеры управления мощностью энергоблоков электростанций, 13,14,15 – каналы измерения частоты и выдаваемой генераторами энергоблоков мощности,16,17,18 – каналы воздействия контроллеров на выдаваемую генераторами энергоблоков мощность
На (рис. 2) приведен график изменения частоты в электроэнергетической системе (ЭЭС) под воздействием возмущений в виде нарушений баланса активной мощности и реакций на эти изменения мультиагентной системы регулирования частоты и мощности (МАС РЧ).
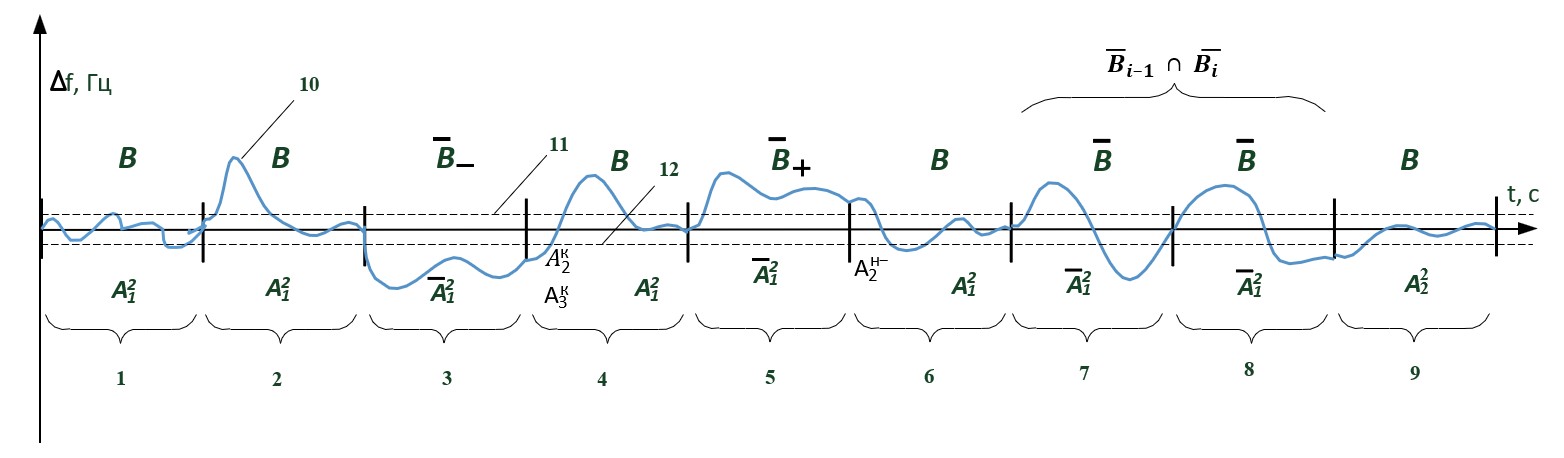
1-9 - номера синхронизированных для всех контроллеров (рис. 1) тактовых интервалов времени, 10 - график изменения частоты в энергосистеме, 11, 12 – верхняя и нижняя границы эффективного удержания частоты в ЭЭС вторичным регулированием, В с модификациями – классы состояния системы регулирования частоты и мощности в энергосистеме, А с модификациями – указатель участника регулирования частоты на такте времени и характера его участия
До ввода системы автоматического регулирования частоты в работу на интеллектуальных контроллерах (10-12, рис. 1) устанавливается приоритетность участия электростанций во вторичном регулировании частоты, а также вводятся следующие параметры: единая для всех длительность тактов времени, синхронизируемых спутниками, времена ввода резервов первичного, вторичного регулирования, коррекции мощности для восстановления резервов вторичного регулирования.
Интеллектуальные контроллеры управления мощностью энергоблоков электростанций на основании заданных условий идентифицируют класс состояния системы регулирования частоты и по заданным правилам принимают решение о характере своего участия в регулировании частоты, переходя к астатическому регулированию, блокируя астатическое регулирование, производя коррекцию выдаваемой мощности для восстановления резервов вторичного регулирования в энергосистеме или переходя к изменению своей плановой выдаваемой мощности. Для этого запускаются алгоритмы идентификации классов состояния системы регулирования частоты внутри такта времени и принятия решений по установленным единым правилам участия электростанций в поддержании баланса мощности в ЭЭС и разрешений на изменение их загрузки.
При принятии решений об участии электростанций в регулировании частоты и выдаваемой мощности контроллеры используют следующие классы состояния системы регулирования частоты и мощности, а также условия для их идентификации:
Классы состояний процесса регулирования частоты в текущем такте времени
№ | Наименование | Обозначение | Описание | Условие |
|---|---|---|---|---|
1 | Эффективная работа вторичного регулирования в текущем такте времени | B | Частота находится в зоне значений ее эффективного поддержания вторичным регулированием с суммарной длительностью 0.5 – 1.0 от длительности такта | Δf ∈ fуставки ± Δfдоп.втор.рег. |
2 | Неэффективная работа вторичного регулирования в текущем такте времени | B̄ | Баланс активной мощности на большей части продолжительности такта времени не поддерживается | Условие 1 (табл.1) не выполняется |
3 | Неэффективная работа вторичного регулирования в текущем такте времени с дефицитом активной мощности | B̄_ | Дефицит активной мощности сохраняется на большей части продолжительности такта времени | B̄ ∩ Δf < 0 |
4 | Неэффективная работа вторичного регулирования в текущем такте времени с избытком активной мощности | B̄+ | Избыток активной мощности сохраняется на большей части продолжительности такта времени | B̄ ∩ Δf > 0 |
5 | Необходимость блокировки вторичного регулирования на ведущей станции с последующим его вводом на второй в списке приоритетности электростанции | C + 1 | Отказ вторичного регулирования | B̄(i-1) ∩ B̄i |
6 | Необходимость блокировки вторичного регулирования на второй ведущей станции с последующим его вводом на третьей в списке приоритетности | C + 2 | Отказ вторичного регулирования | B̄(i-2) ∩ B̄(i-1) ∩ B̄i |
7 | Разрешение команд внешним системам на изменение выдаваемой электростанцией мощности | D | Вторичное регулирование способно балансировать систему при изменении мощности электростанций | B |
8 | Разрешение команд внешних систем на увеличение выдаваемой электростанцией мощности | D⁺ | Вторичное регулирование способно балансировать систему при увеличении мощности электростанций | B ∪ B̄- |
9 | Разрешение команд внешних систем на снижение выдаваемой электростанцией мощности | D⁻ | Вторичное регулирование способно балансировать систему при снижении мощности электростанций | B ∪ B̄+ |
10 | Запрос на увеличение выдаваемой электростанцией мощности | D_к⁺ | Необходимо восстановление резерва вторичного регулирования на снижение мощности | B̄- |
11 | Запрос на снижение электростанцией мощности | D_к⁻ | Необходимо восстановление резерва вторичного регулирования на увеличение | B̄+ |
Таблица 1
где fуставки – уставка вторичного регулирования частоты,
Δfдоп. втор. рег – допустимая погрешность восстановления частоты вторичным регулированием,
Δf - текущее значение отклонения частоты от уставки.
Для управления электростанциями при осуществлении регулирования частоты и мощности в сети, а также разрешения изменения их плановой загрузки контроллеры используют следующие общие правила:
- Все генераторы участвуют в первичном регулировании;
- Для астатического (вторичного) регулирования используются электростанции с заблаговременно установленной приоритетностью их участия в регулировании;
- При выявлении неэффективности вторичного регулирования длительностью более 2-х тактов, вторичное регулирование на электростанции прекращается;
- При выявлении неэффективности вторичного регулирования на интервале времени заданной кратности такта времени для генераторов, включенных в ранжированный перечень их привлечения ко вторичному регулированию, вторичное регулирование вводится на соответствующей электростанции из этого перечня;
- При одностороннем отклонении частоты на полном такте времени, на электростанциях, не входящих в перечень для участия во вторичном регулировании, запускается коррекция мощности, направленная на устранение возникшей несбалансированности режима, продолжительностью не более длительности такта времени. Фиксируется величина изменения мощности до восстановления частоты и производится дополнительное изменение заданной кратности по отношению к введенной до восстановления частоты для восстановления резерва мощности на ведущей по частоте электростанции;
- Изменение загрузки электростанций, помимо воздействий для регулирования частоты, разрешается в двух случаях и со временем отработки не более длительности тактового интервала:
- После выявления зависания отклонения частоты от уставки, разрешается изменение загрузки в направлении снижения этого отклонения;
- После подтверждения эффективности вторичного регулирования на предшествующем такте времени.
После синхронизации электростанций и их включения на параллельную работу система регулирования частоты и мощности вводится в работу.
На первом и втором такте времени графика (рис. 2) частота удерживается электростанцией 1, ведущей по частоте (класс 𝐴2), в коридоре эффективности вторичного регулирования, т.е. более половины такта времени, даже несмотря на то, что во втором такте возникло нарушение баланса мощности (класс 𝐵). На этих тактах времени контроллерами электростанций 2,3 разрешено изменение загрузки электростанций для такта 3 (при условиях сохранения эффективности вторичного регулирования), однако на такте 3 условие эффективности не выполнилось.
На третьем такте времени контроллерами выявлена неэффективность вторичного регулирования с дефицитом активной мощности в ЭЭС (класс 𝐵−). Электростанциям 2,3 на четвертом такте времени дается задание на коррекцию мощности для восстановления резерва вторичного регулирования на электростанции 1. Увеличение загрузки этими электростанциями производится с фиксацией введенной мощности до восстановления номинальной частоты с последующей дополнительной загрузкой на величину с заданной
кратностью по отношению к введенной (𝐴к, Ак). После восстановления резерва вторичного регулирования на электростанции 1 частота в ЭЭС на четвертом такте времени частота восстановилась (частота суммарно находится в коридоре эффективности вторичного регулирования более половины такта времени).
На 5-ом такте времени контроллерами выявлена неэффективность вторичного регулирования с избытком активной мощности в ЭЭС (класс B+). Электростанциям 2,3 на 6 такте времени дается задание на коррекцию мощности для восстановления резерва вторичного регулирования на электростанции 1, а также разрешается снижение мощности. При этом, допустим, что на 3-ей электростанции возникло отсутствие возможности снижения мощности, а на второй стало предпочтительным снижение загрузки электростанции (класс Ан−).
Снижение загрузки электростанции 2 на 6-м такте времени приводит к восстановлению резерва вторичного регулирования на электростанции 1 и эффективности вторичного регулирования (класс 𝐵).
На 7-ом и 8-ом тактах времени (двух подряд) контроллеры на электростанциях выявляют длительную неэффективность вторичного регулирования (𝐵7 ∩ 𝐵8), при этом на контроллере электростанции 1 вторичное регулирование выводится, а на следующей по приоритетности для вторичного регулирования электростанции 2 вводится (A2).
На 9-ом такте времени контроллерами идентифицируется эффективное вторичное регулирование (𝐵) в энергосистеме электростанцией 2 ( 𝐴2).
Таким образом, в мультиагентном способе регулирования частоты назначение и изменение ведущей по частоте электростанции, поддержание ее резервов мощности вторичного регулирования, разрешение и осуществление изменения плановой мощности на электростанциях энергосистемы осуществляется без централизованного управления и использования технологических каналов передачи данных, что упрощает систему регулирования частоты и повышает ее надежность.
3. Поддержание баланса реактивной мощности (регулирование напряжения) в нормальных режимах
В данном разделе рассматривается децентрализованное мультиагентное регулирование напряжения в электрической сети с распределенной малой генерацией, хотя данное ограничение не является обязательным. Участниками регулирования напряжения являются агенты электрической сети, электростанций и локальных энергосистем, интегрированных в сеть, а также потребителей с управляемыми средствами регулирования напряжения и реактивной мощности.
В отличие от баланса активной мощности в сети, имеющего общий характер и контролируемого всеми участниками процесса по отклонению частоты, балансы реактивной мощности имеют локальный характер и контролируются по уровням напряжения в конкретных районах. Кроме того, здесь более обостренно проявляются противоречия в целях субъектов, участвующих в регулирования напряжения. Так, для сетевой компании предпочтительно повышенное напряжение в сети, способствующее увеличению потребления энергии электроприемниками, что увеличивает пропуск энергии по сети, и, при этом, снижаются относительные нагрузочные потери при передаче электроэнергии. Потребителям предпочтительно пониженное напряжение (процентов на 5), что снижает электропотребление и увеличивает ресурс оборудования [5,6]. В таких условиях регулирование напряжения множествами агентов разных субъектов будет приводить к созданию компромиссных режимов, учитывающих интересы разных субъектов.
Можно сформулировать следующие принципы организации децентрализованного мультиагентного распределенного регулирования напряжения [6-10]:
- Равноправие агентов в составе МАС, что способствует недискриминационному компромиссу по режиму напряжения электрической сети;
- Локальность контроля режима (агент располагает параметрами режима только в контролируемом районе, границы которого определяются возможностями косвенных измерений напряжений на удаленных концах отходящих линий электропередачи);
- Локальность и минимальность обмена информацией между агентами (для передачи данных используются малозатратные, низкоскоростные каналы передачи данных по линям электропередачи) или его полное отсутствие;
- Единство системных правил для всех агентов МАС;
- Предпочтительность противоаварийного управления над режимным при нарушениях нормального режима электрической сети.
Системные правила принятия решений и осуществления действий агентами с учетом режима контролируемого района и согласования действий со смежными агентами
Принятие решений агентами по изменению баланса реактивных мощностей в контролируемой зоне, коэффициентов трансформации базируется на единой классификации состояний по напряжению контролируемого района сети, представленной в табл. 2.
Классы режимов напряжений в контролируемых агентами районах сети
№ | Наименование | Условие принадлежности |
|---|---|---|
1 | Нормальный оптимальный | Экстремум критерия оптимальности режима агента при длительно допустимых напряжениях |
2 | Нормальный | Контролируемые агентом напряжения длительно допустимы |
3 | Допустимо повышенный | Контролируемые агентом напряжения состоят из нормальных и кратковременно допустимых повышенных |
4 | Допустимо пониженный | Контролируемые агентом напряжения состоят из нормальных и кратковременно допустимых пониженных |
5 | Аварийно повышенный | Контролируемые агентом напряжения содержат аварийно повышенные, но не содержит аварийно пониженных |
6 | Аварийно пониженный | Контролируемые агентом напряжения содержат аварийно пониженные, но не содержит аварийно повышенных |
7 | Режим двухсторонних нарушений (с повышенными и сниженными напряжениями) | Контролируемые агентом напряжения содержат как длительно недопустимые пониженные, так и повышенные |
Таблица 2
Правила принятия решений по корректировке уставок средств компенсации реактивной мощности по режимным условиям в контролируемой зоне сети
1. Задача ввода режима в допустимую область
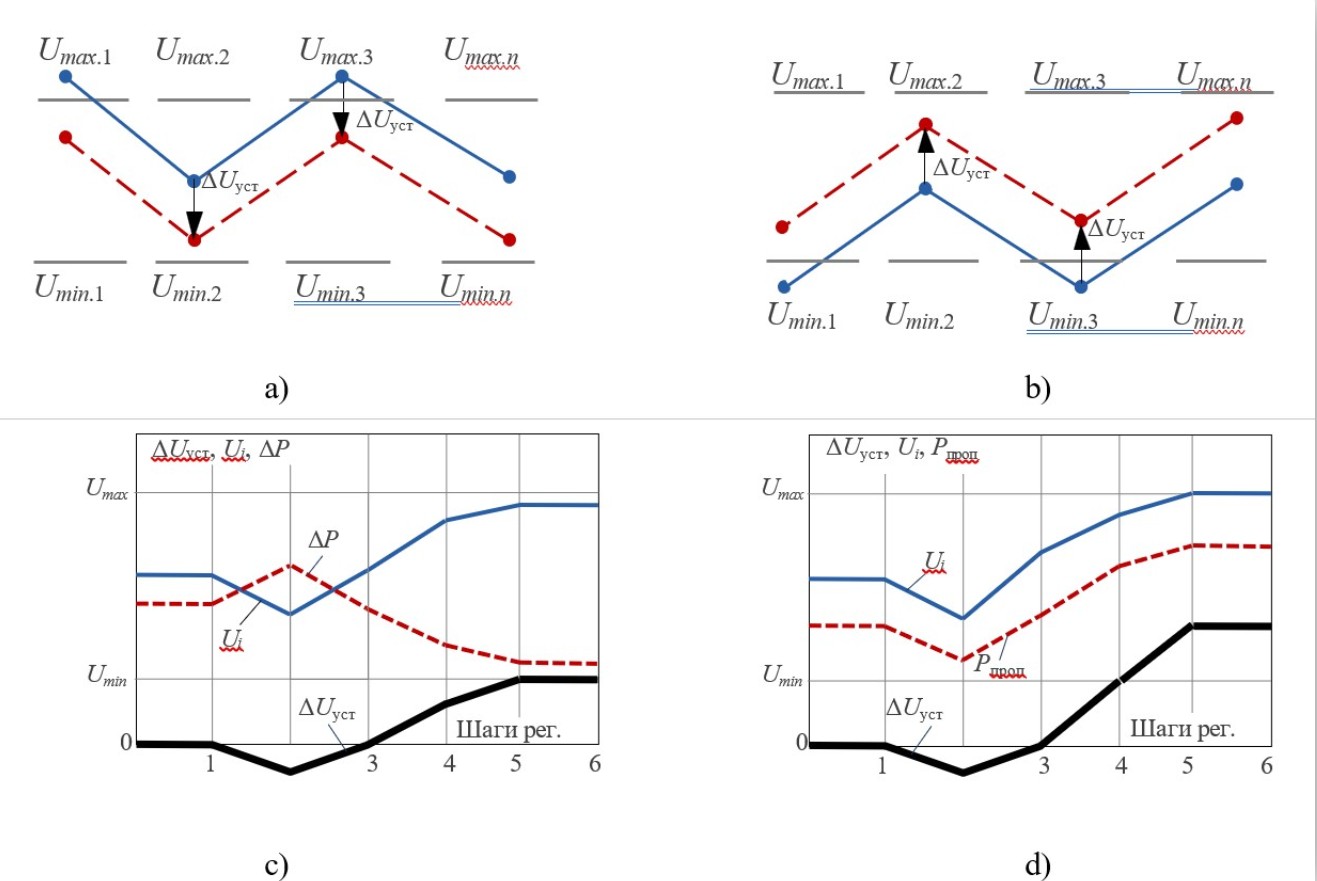
При нарушенных допустимых значениях напряжений узла электрической сети и узлов, примыкающих к нему, уставка корректируется для ввода режима напряжений в допустимые границы (рис. 3)
𝑈𝑚𝑖𝑛.𝑖 < 𝑈𝑖 < 𝑈𝑚𝑎𝑥.𝑖; 𝑈𝑖 ∈ 𝐷,
где 𝑖 = 1 … 𝑛 – количество узлов контролируемого района сети;
𝑈𝑚𝑖𝑛 – минимально допустимое напряжение;
𝑈𝑚𝑎𝑥 – максимально допустимое напряжение;
D – область допустимых напряжений контролируемого района электрической сети.
Правила корректировки уставок регуляторов для ввода режима в допустимую область [7,8]:
- Если класс состояния 3 или 5, уставку регулирования источника реактивной мощности уменьшают (рис. 3, а).
- Если класс состояния 4 или 6, уставку регулирования источника реактивной мощности увеличивают (рис. 3, b).
2. Задача минимизации потерь в контролируемом районе сети
При допустимых напряжениях в узлах уставка корректируется для снижения потерь мощности в контролируемом районе сети или увеличения пропуска мощности по сети.
𝛥𝑃(𝑈) → 𝑚𝑖𝑛; Рпроп =∑k Рj ,
где 𝑗 = 1 … 𝑘 – количество ветвей c входящим в район потоком мощности.
Нагрузочные потери определяются, как результат косвенных измерений по локальным параметрам на основе известной квадратичной зависимости
𝛥𝑃 = ∑𝑛 𝐼2𝑅 j ;
где 𝑖 = 1 … 𝑛 – количество ветвей контролируемого района.
Правила корректировки уставки для оптимизации потерь по проявлению физического процесса:
- Если класс состояния 1, то осуществляют пробное изменение уставки в любом направлении и определяют изменение потерь или пропуска мощности в прилегающем районе сети;
- Если при этом происходит снижение потерь или увеличение пропуска мощности в прилегающем районе сети, то продолжают изменять уставку в принятом направлении до достижения нулевого приращения потерь или пропуска мощности, или максимально или минимально допустимых напряжений в контролируемых узлах прилегающего района сети;
- Если же, при пробном изменении уставки, произошло увеличение потерь или снижение пропуска мощности в прилегающем районе сети, то меняют направление изменения уставки и продолжают изменять уставку в новом направлении до достижения нулевого приращения потерь или пропуска мощности или максимально или минимально допустимых напряжений в контролируемых узлах прилегающего района сети (рис. 3 c, d);
- Если при корректировке уставок в классах состояния 3-6 потери мощности снижаются или пропуск мощности увеличивается, то корректировку уставок продолжают в том же направлении до достижения максимально или минимально допустимого напряжения в любом из контролируемых узлов или до исчезновения приращения потерь или пропуска мощности в контролируемом районе сети.
Правила координации взаимодействия смежных агентов (при наличии минимального обмена данными между смежными агентами):
- Агент, планирующий выполнить действие, уведомляет о его цели и характере смежным агентам;
- При отсутствии собственной возможности нормализации режима напряжений в своем районе Агент запрашивает помощь смежных агентов;
- Агент, получивший уведомление о планируемом действии смежного агента, запрещает его, если у него нет возможностей компенсации негативных последствий в контролируемом районе от действий смежного агента;
- Агент выполняет действия после получения от смежных агентов разрешений на их осуществление и действует до достижения цели или получения запрета на их продолжение от смежных агентов;
- Агент уведомляет смежных агентов о завершении своих действий.
Обмен сообщениями между смежными Агентами:
- Режим нормальный, бездействую, готов помогать»;
- Режим допустимо повышенный, снижаю напряжение, запрещаю повышение напряжения смежными агентами». Если собственной возможности снизить напряжение нет, то «Прошу помочь снизить напряжение»;
- Если режим допустимо пониженный, то «Повышаю напряжение, запрещаю снижение напряжения смежным агентам».Если запас регулирования исчерпан, то «Прошу помочь повысить напряжение»;
- Режим аварийно повышенный, снижаю аварийное напряжение, запрещаю повышение напряжения смежными агентами».Если собственной возможности снизить напряжение нет, то «Прошу экстренно снизить напряжение»;
- Режим аварийно пониженный, повышаю напряжение, запрещаю снижать напряжение смежными агентами». Если исчерпан запас регулирования, то «Прошу экстренно повысить напряжение».
Характерный процесс выхода на компромиссный установившийся режим электрической сети с учетом взаимодействия агентов МАС при вводе режима напряжения в допустимую область представлен на (рис. 4).
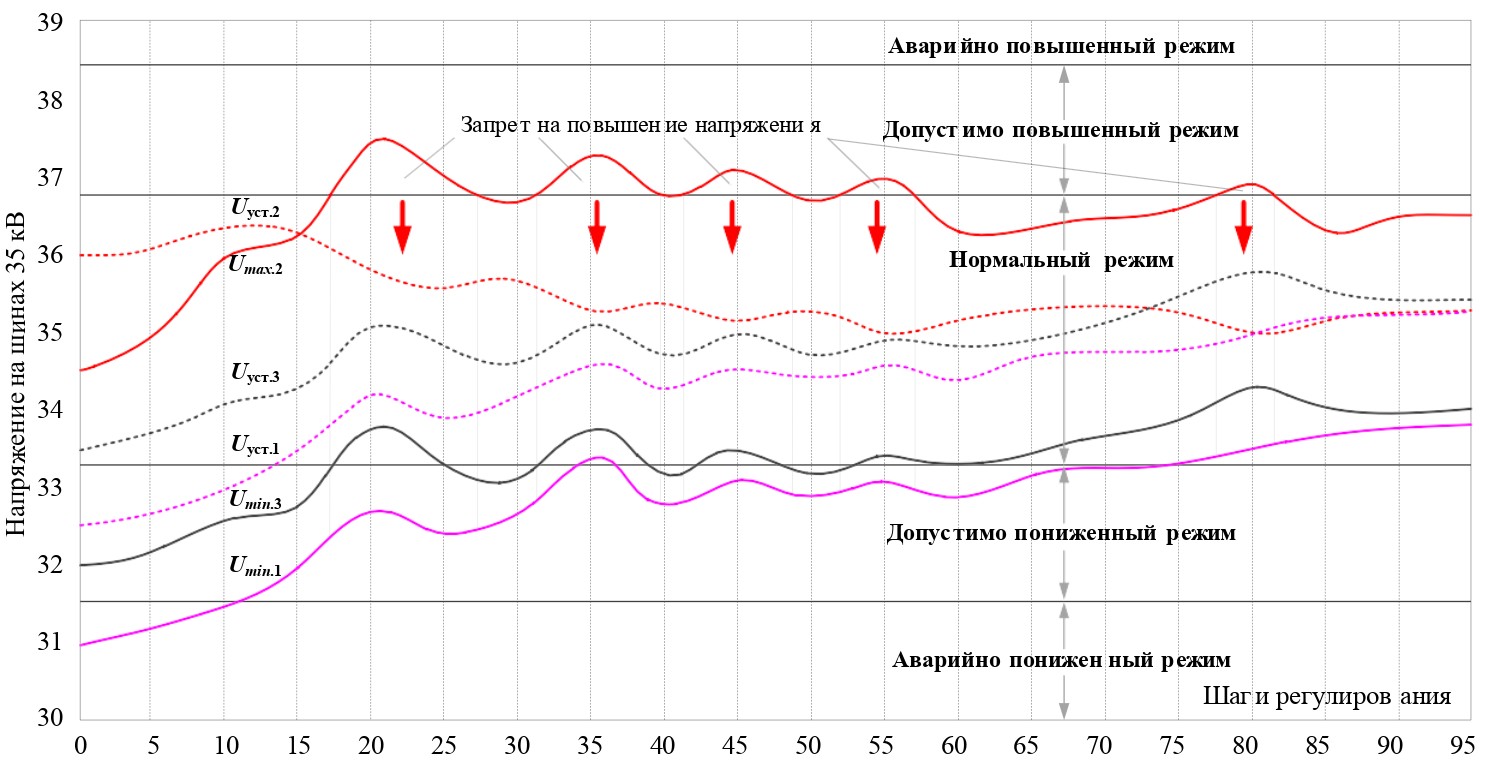
Можно увидеть, что агенты 1 и 3, находясь в допустимо и аварийно пониженном режиме, сообщают о намерении своих действий агенту 2. Он находится в нормальном режиме и разрешает им действия на повышение напряжения. Агенты 1 и 3, корректируя уставки регуляторов напряжения в своих контролируемых районах, нарушают допустимость режима напряжений в контролируемом районе агента 2, и получают от него запрет на повышение напряжения. Агент 2 корректирует уставку для снижения напряжения и, после ввода режима напряжения в допустимую область, снимает запрет. Агенты 1 и 3 продолжают корректировать уставку в направлении повышения напряжения.
Процесс завершается после ввода режима напряжения всей сети в допустимую область.
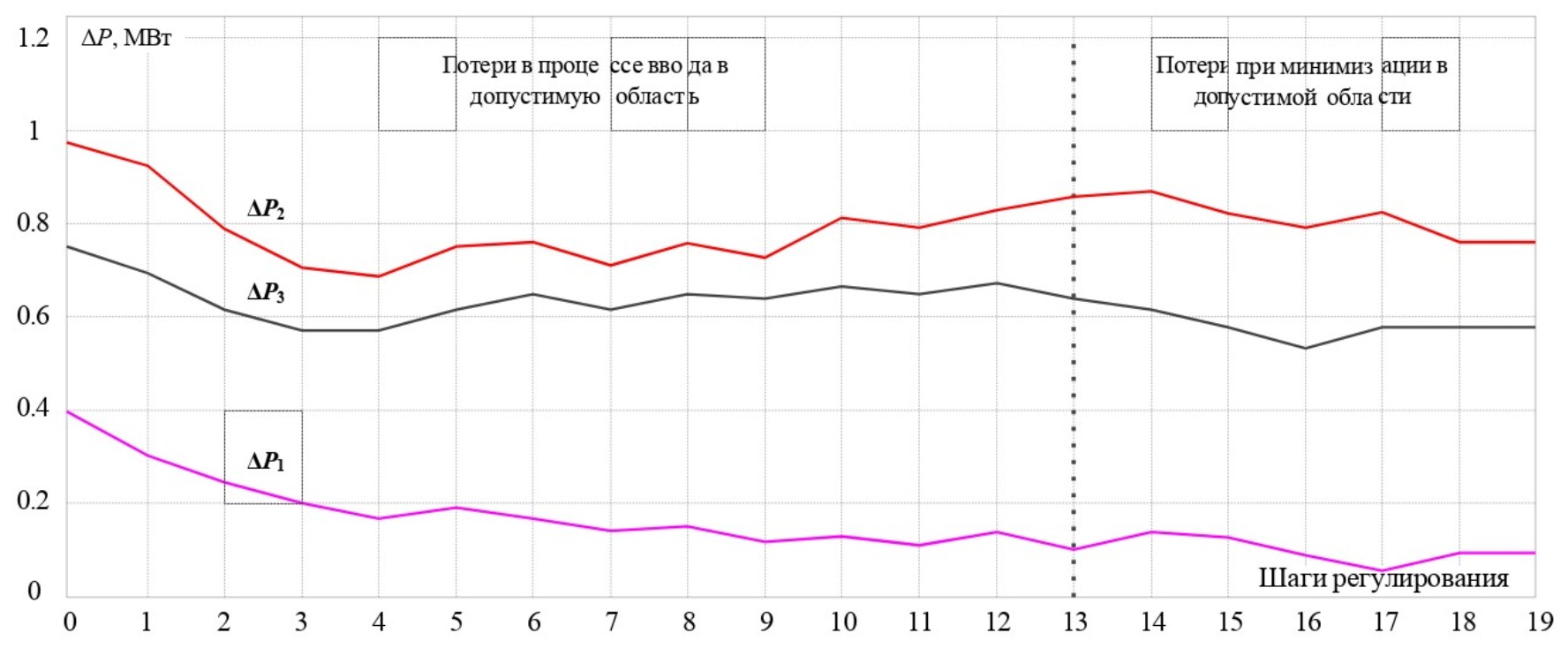
После нормализации режима целью агентов стала минимизация потерь. На (рис. 5) представлен процесс согласованной оптимизации потерь в контролируемых зонах с учетом взаимодействий агентов по предотвращению выхода напряжений из допустимой области.
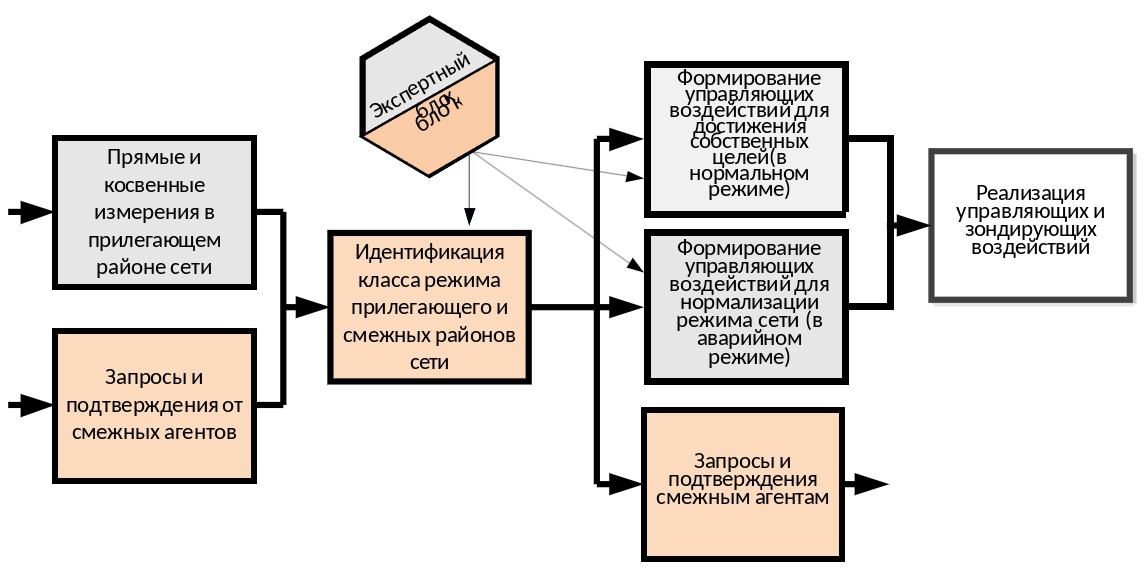
На (рис. 6) представлена структура «интеллектуального» регулятора напряжения агента МАС.
В заключении данного раздела следует отметить, что:
- Одноуровневая мультиагентная система регулирования напряжения с самонастройкой регуляторов и координацией действий смежных агентов способна обеспечивать эффективное регулирование напряжения в электрической сети в нормальных и аварийных режимах;
- Согласованность действий интеллектуальных агентов одноуровневой мультиагентной системы регулирования напряжения обеспечивается контролем режима прилегающего района электрической сети и, при необходимости, координацией действий смежных агентов в зоне их взаимного влияния, осуществляемых по общим правилам.
4. Управление сбалансированным распадом сети
В отличие от пассивной сети, в которой надежность энергоснабжения обеспечивается сетевым резервом, в активной сети, при высокой степени сбалансированности по мощности, надежность преимущественно обеспечивается распределенной по сети генерацией при соответствующем управлении.
Противоаварийный распад активной сети на части целесообразен при условии максимальной сбалансированности частей, что соответствует переходу к использованию имеющейся генерации для резервирования электроснабжения и сохранения в работе электростанций. Такой распад также обеспечивается соответствующим децентрализованным управлением [11,12], а последующее восстановление целостности сети и нормального режима связано с решением задачи синхронизации разделившихся частей [13-23].
5. Децентрализованное мультиагентное управление восстановлением целостности и нормального режима электрической сети с распределенной генерацией после ее аварийного или противоаварийного распада на сбалансированные части
Для осуществления восстановления целостности сети при децентрализованном управлении необходимо исключить вероятность одновременного включения
выключателей с наличием одностороннего напряжения, приводящих к объединению частей сети без синхронизации. Для этого на выключателях электрической сети с автоматическим децентрализованным управлением коммутациями осуществляют разделение времени их срабатывания в составе синхронизированных тактов времени, внутри которых каждому выключателю отводится свой временной квант времени на срабатывание, отключенные выключатели включаются при возникновении нормального напряжения с одной стороны исключительно в своем кванте времени, при возникновении нормального напряжения с двух сторон, выключатели включаются сразу при выполнении всех условий синхронизации связываемых выключателем источников. Фиксация факта синхронизации контроллерами генераторов осуществляется по возникновению колебаний тока с частотой электромеханического переходного процесса.
Восстановление целостности сети можно разделить на два этапа:
- На первом осуществляется децентрализованная сборка сетевых элементов, не требующих синхронизации объединяемых ими частей сети;
- На втором осуществляется децентрализованная синхронизация разделенных частей сети на удаленных сетевых выключателях.
Задаче синхронизации Microgrid и разделенных активных частей сети посвящено множество исследований [13-23].
Основными факторами, определяющими особенности синхронизации электростанций малой мощности, активных частей сети и объектов с малой генерацией между собой и с внешней энергосистемой, являются их малая инерционность (около 1 с) и высокая стохастичность нагрузки, определяющие на порядок более интенсивные колебания частоты и взаимных углов при синхронизации, а также необходимость синхронизации на удаленных от электростанций элементах сети в условиях отсутствия телепередачи данных о режимных параметрах.
Существующие способы, в частности, способ пассивной и активной синхронизации не удовлетворяют требованиям и условиям поставленной задачи. К тому же, в активных сетях после их распада возможны случаи зависания частоты и напряжения на повышенном или пониженном уровне в отдельных частях.
Для достижения успешной синхронизации электростанций малой мощности, активных частей сети и объектов с малой генерацией предложен способ удаленной синхронизации и восстановления нормального режима аварийно разделенной электрической сети [14]. Назначением способа является автоматическая синхронизация и восстановление нормального режима параллельной работы разделившихся частей электрической сети на удаленных коммутационных аппаратах без использования передачи данных и команд телеуправления ими.
Для достижения успешности децентрализованной синхронизации предлагается специальное синхронизирующее управление мощностью и возбуждением генераторов в зависимости от класса балансов активной и реактивной мощности в разделившихся частях сети.
Процесс управления децентрализованной синхронизацией частей сети разбит на несколько этапов:
- выявление в каждой активной части сети квазиустановившегося послеаварийного режима;
- идентификация класса балансов активной и реактивной мощности в разделившихся частях сети;
- гармонизация частоты и напряжения в разделившихся частях сети;
- сканирование выполнения условий синхронизации в частях сети с балансами активной и реактивной мощности, а также на отделившихся электростанциях путем низкочастотного согласованного (гармонизированного) регулирования частоты и напряжения;
- включение сетевых коммутационных аппаратов, улавливающих выполнение условий синхронизации;
- выявление на электростанциях, включаемых на параллельную работу, признаков ее возникновения с прекращением сканирования условий синхронизации и переходом к нормальному регулированию напряжения и частоты.
Классы балансов активной и реактивной мощности в разделившихся частях сети
Множество классов состояний (табл. 3) определяется последствиями разбалансировки по активной и реактивной мощности аварийно или противоаварийно отделившихся частей сети. Основной причиной невозможности восстановления нормального баланса активной и реактивной мощности в отделившейся части сети являются исчерпание резервных активной и реактивной мощности в результате действия автоматических регуляторов частоты и напряжения (АРЧ и АРН).
Множество классов балансов мощности частей сети после ее распада
Обозначение класса состояния | Соотношение генерации и потребления мощности | Режимные параметры сети после распада | |
|---|---|---|---|
Частота - f | Напряжение - U | ||
К1 | Баланс активной и реактивной мощностей | f≈fном | U≈Uном |
К2 | Баланс активной и избыток реактивной мощностей | f≈fном | U>>Uном |
К3 | Баланс активной и дефицит реактивной мощностей | f≈fном | U<<Uном |
К4 | Избыток активной и баланс реактивной мощностей | f>>fном | U≈Uном |
К5 | Дефицит активной и баланс реактивной мощностей | f<<fном | U≈Uном |
К6 | Избыток активной и реактивной мощностей | f>>fном | U>>Uном |
К7 | Избыток активной и дефицит реактивной мощностей | f>>fном | U<<Uном |
К8 | Дефицит активной и избыток реактивной мощностей | f<<fном | U>>Uном |
К9 | Дефицит активной и реактивной мощностей | f<<fном | U<<Uном |
К10 | Отсутствие генерации мощности | 0 | 0 |
Таблица 3
Для классов К2-К9 характерно существование таких небалансов мощности, при которых невозможно восстановление режима с близкими к номинальным, параметрами.
Под классом К10 понимается пассивная часть сети, в которой потребители полностью теряют энергоснабжение. В класс К1 входят те части распавшейся сети, в которых удается восстановить баланс активной и реактивной мощности.
Гармонизация частоты и напряжения
Под гармонизацией понимается работа регуляторов возбуждения и мощности, направленная на приведение относительных отклонений напряжения и частоты от номинальных значений к одинаковому значению для обеспечения их последующего согласованного изменения или обеспечения равенства и постоянства в относительных значениях (рис. 7).
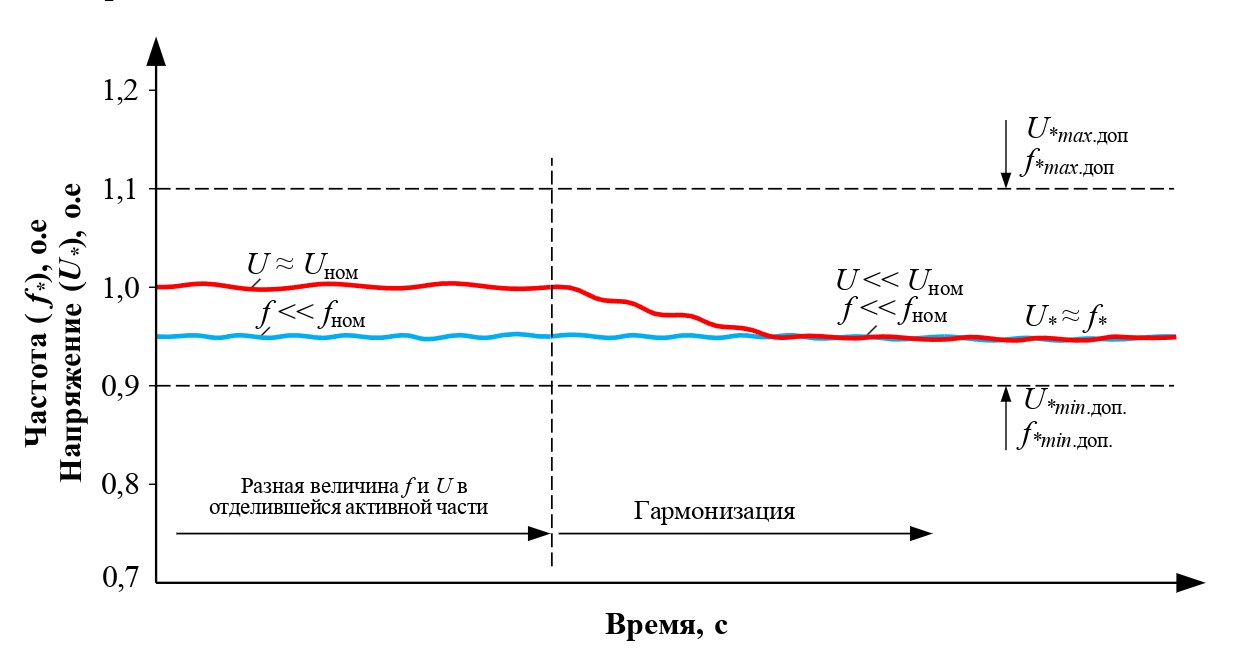
Назначение гармонизации в снижении числа параметров, совпадение которых является условием срабатывания коммутационных аппаратов с улавливанием синхронизма, т.к. после гармонизации вместо двух существенно отличающихся в относительных величинах параметров имеем пару с равными или близкими значениями.
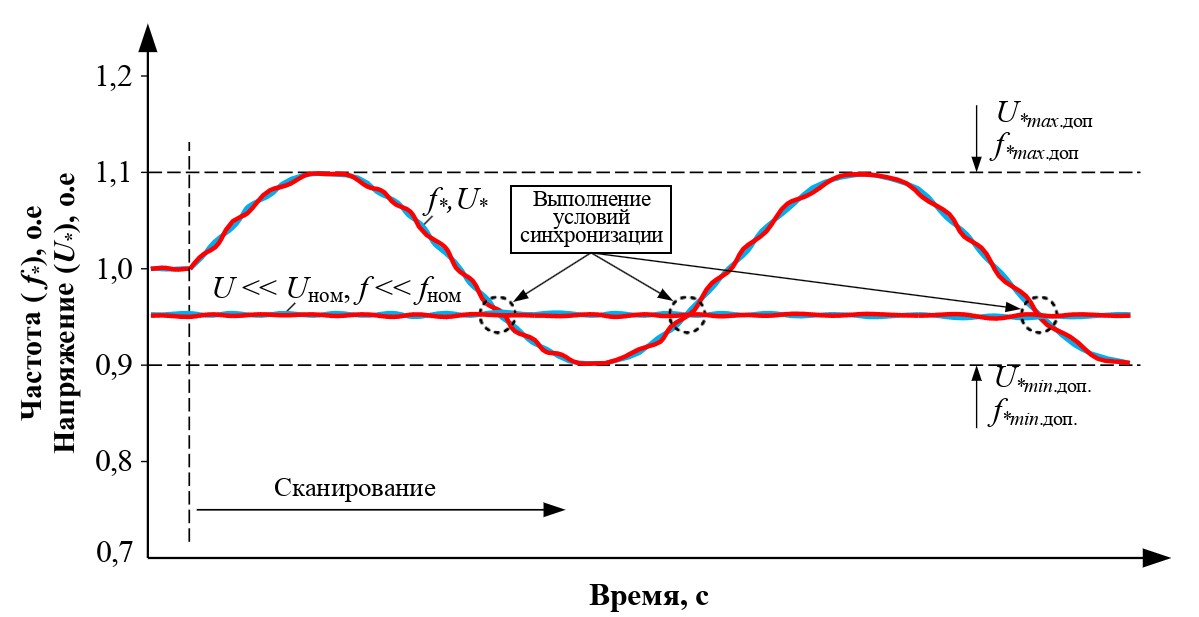
Сканирование выполнения условий синхронизации
Назначение сканирования - осуществление вторичного согласованного низкочастотного регулирования гармонизированных частоты и напряжения в пределах допустимых диапазонов их изменения для создания условий успешной синхронизации частей сети на удаленных сетевых коммутационных аппаратах.
На (рис. 8) представлен пример низкочастотного согласованного изменения частоты и напряжения (f, U) в активной части сети класса К1 и гармонизированной другой части сети с пониженными параметрами (f << fном, U << Uном), соответствующей классу К9.
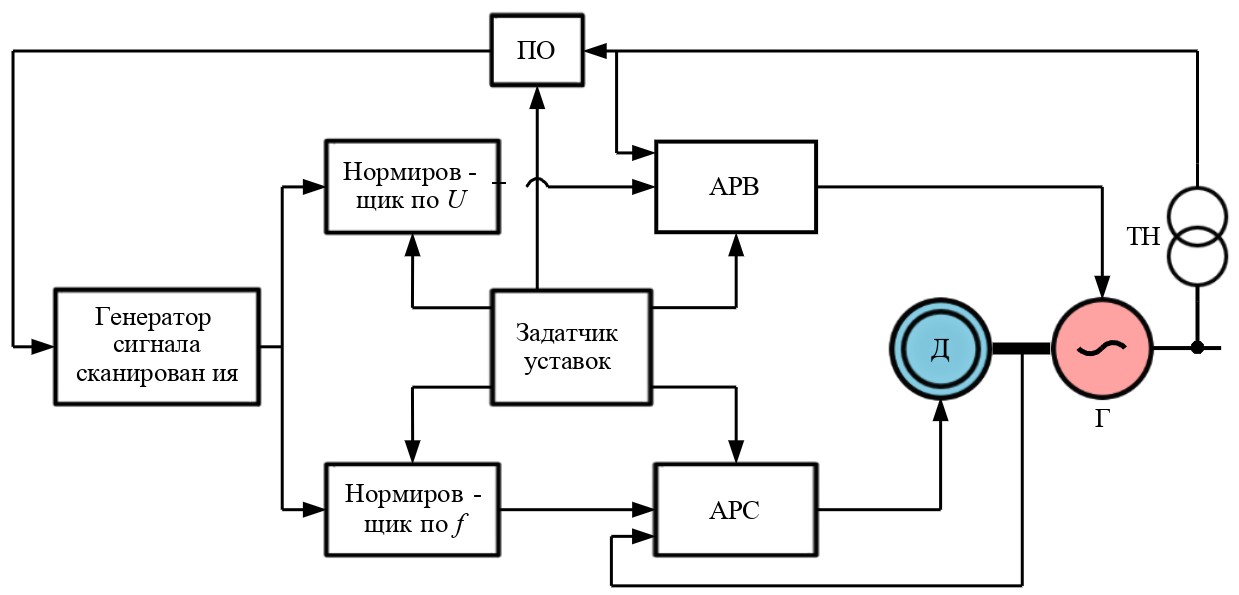
На (рис. 9) приведена блок-схема системы регулирования мощности и напряжения генератора, сканирующего условия синхронизации.
Критические параметры процесса сканирования условий синхронизации
Успешность синхронизации определяющим образом зависит от параметров процесса сканирования ее условий, к числу который следует отнести:
- Диапазон согласованного изменения частоты и напряжения;
- Форма периодического изменения частоты и напряжения при сканировании;
- Частота (период) изменения частоты и напряжения при сканировании;
- Фазовое смещение изменений при одновременном сканировании генераторов в разных разделенных частях сети.
Остановимся на каждом из этих параметров подробнее.
Диапазон согласованного изменения частоты и напряжения определяется предельно возможными их установившимися отклонениями в послеаварийных режимах. Для частей изолированно работающих энергосистем малой мощности или активных сетей можно ориентироваться на отклонения ± 3-4%.
Форма периодического изменения предпочтительна линейная, т.к. пересечения линейных функций всегда будут происходить при постоянстве угла, т.е. постоянстве изменения взаимного скольжения синхронизируемых векторов, независимо от места их пересечения (значений совпадающих параметров).
Частота (период) изменения частоты и напряжения при сканировании определяется условием обязательности прохождения взаимным углом синхронизируемых векторов напряжений через 0 на интервале изменения скольжения ± Sдоп (например, ± 0,1 Гц/с), что означает проворот угла на 360 град при изменении скольжения в указанном диапазоне.
Данные условия графически можно представить следующим образом (рис. 10)
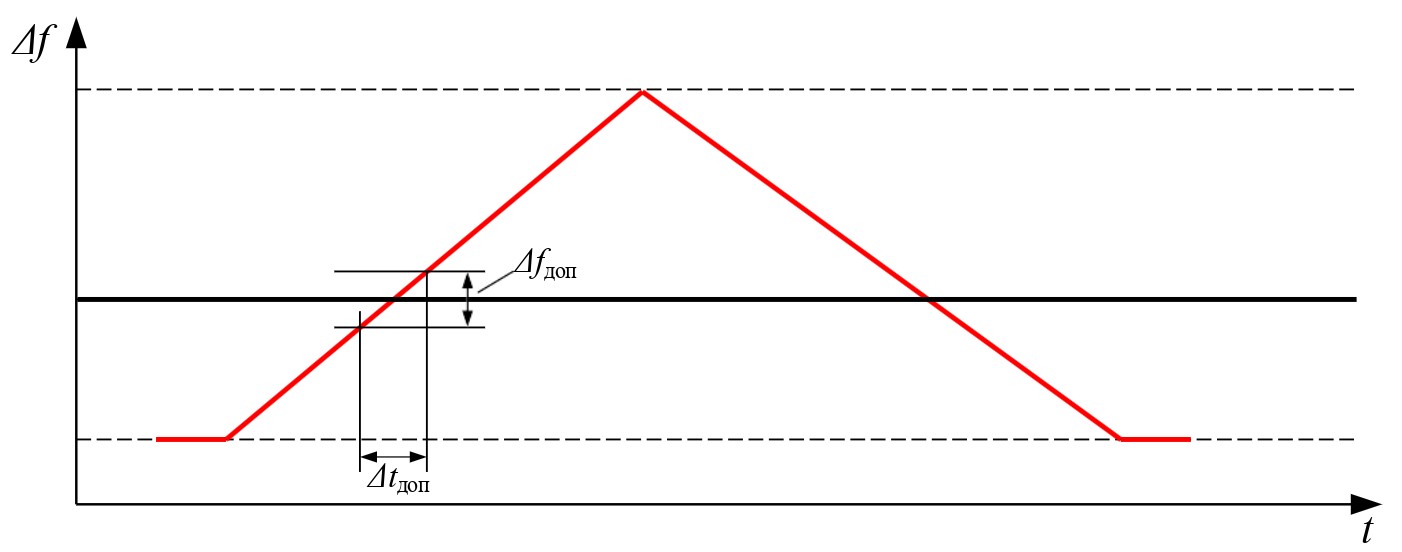
Крутизна характеристики сканирования (ХС):
где 𝐾доп = 𝐾1−𝐾2 - взаимная крутизна пересекающихся ХС; 𝛥𝛿треб – проворот взаимного угла на 360 град на интервале изменения 𝛥𝑓 = 𝛥𝑓доп для гарантированного выполнения 3- го условия синхронизации (равенства углов).
Определим Δ𝑡доп из условия

Получим 𝛥𝑡треб из уравнения (8) с учетом (6):
Тогда
Получим для 𝛥𝑓доп = 0,2 Гц (±0,1Гц)
т.е. критическая длительность нахождения скольжения в допустимой зоне 0,2 Гц (±0,1 Гц) равна 10 с. При этом угол провернется на 360 град.
Длительность прохождения частотой всего диапазона сканирования (например, 2 Гц) составит 100 с.
Полный период сканирования будет равен 200 с, т.е. частота сканирования для гарантированного выполнения всех условий синхронизации будет равна 0,02 Гц.
На (рис. 11) представлены ХС для 4-х частей сети, причем для гарантированного создания условий синхронизации всех частей сети в первом полупериоде (точек пересечения ХС) необходимо создать фазовые смещения ХС, т.е. в общем случае ХС должны иметь форму трапеции.
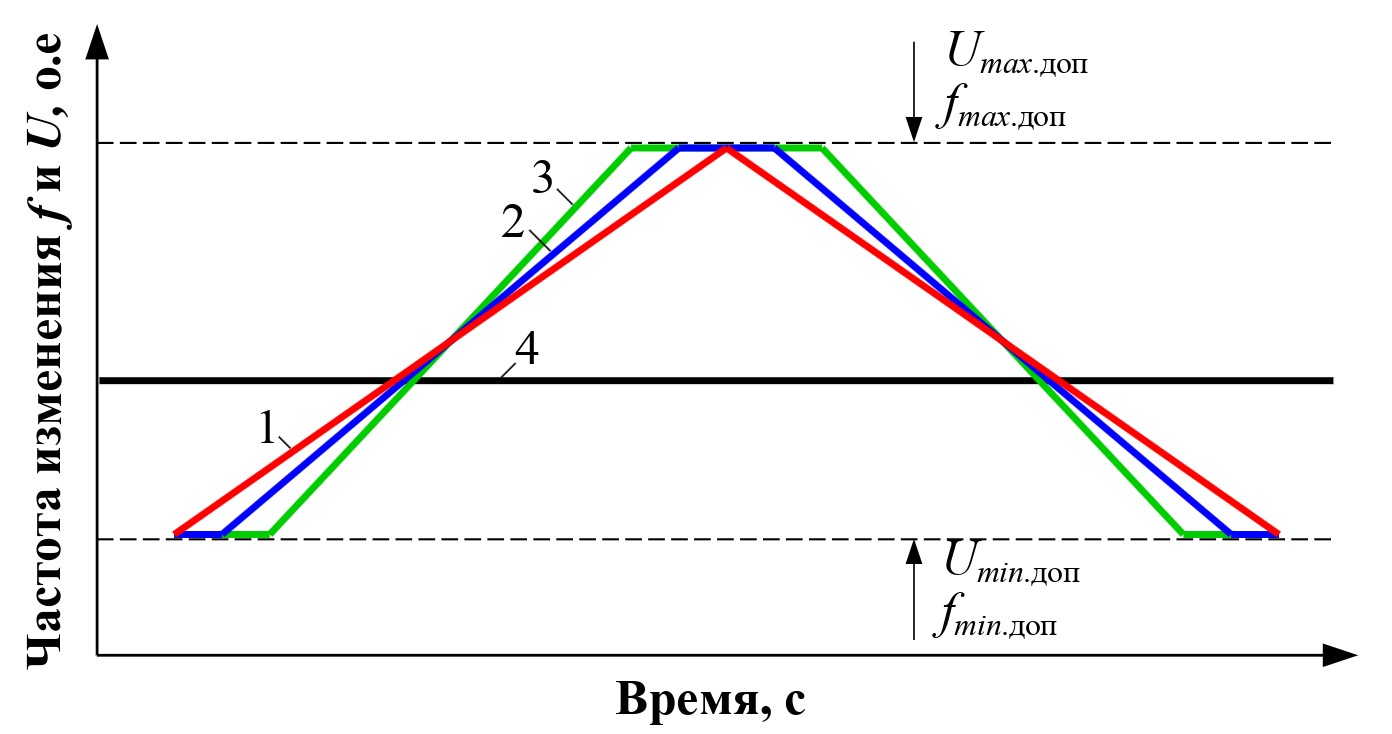
Следует отметить, что осуществление сканирования f, U при синхронизации в сбалансированных частях сети обязательно создаст при пересечении ХС выполнение условий синхронизации для любых частей сети с классами балансов мощности, представленных в табл. 3. Вследствие чего срабатывают пусковые органы устройства автоматического повторного включения с улавливанием синхронизма, включая коммутационный аппарат, соединяющий эти части сети.
Полный процесс восстановления целостности и нормального режима распавшейся на части электрической сети можно представить следующим образом:
- децентрализованно осуществляется сборка сети до сечений, требующих синхронизации;
- децентрализованно осуществляется синхронизация аварийно разделенных активных частей электрической сети с помощью коммутационных аппаратов частей электрической сети в условиях создания согласованных периодических низкочастотных изменений напряжения и частоты с разной частотой для каждой отделившейся части частотой;
- фиксируются включения на параллельную работу частей сети, переходят от регулирования частоты и напряжения на генераторах к регулированию перетока по сечению, связывающему ранее разделенные части, или к регулированию частоты и напряжения в объединенной сети;
- регуляторы возбуждения и мощности генератора более низкого приоритета в группе генераторов, сканирующих условия синхронизации, переводятся в режим поддержания постоянной активной и реактивной мощности до истечения заданного времени восстановления целостности электрической сети;
- по истечении заданного времени восстановления целостности электрической сети на регуляторах всех генераторов восстанавливается нормальный режим регулирования частоты и мощности в электрической сети с множеством распределенных генераторов.
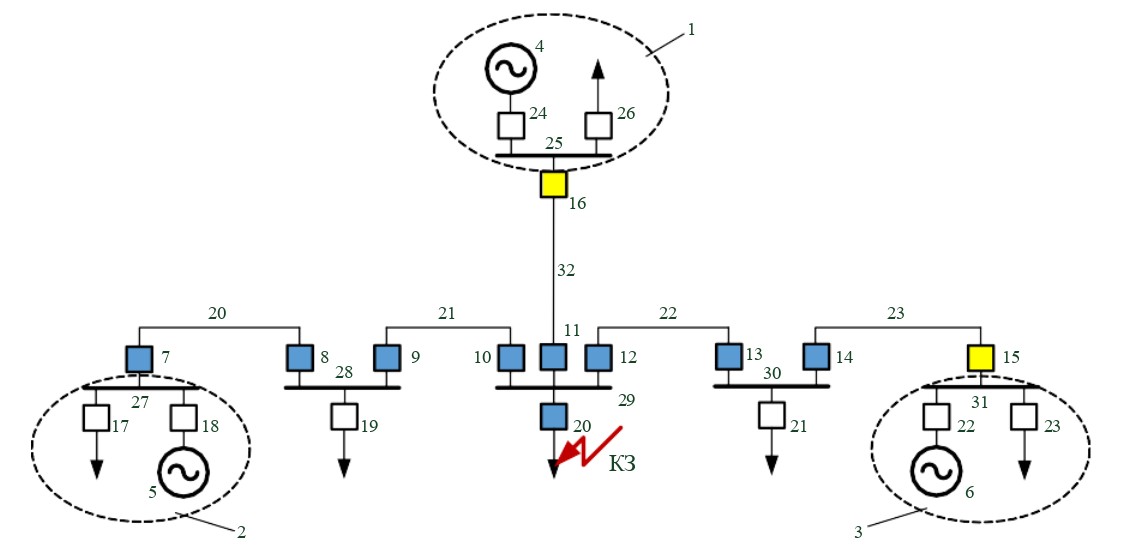
На (рис. 12) представлен пример схемы электрической сети (с выделением синим цветом отключенных выключателей после возникновения короткого замыкания (КЗ) на фидере нагрузки за выключателем) в которой после ее аварийного разделения осуществляется удаленная синхронизация аварийно разделившихся частей сети и восстановление нормального режима их параллельной работы.
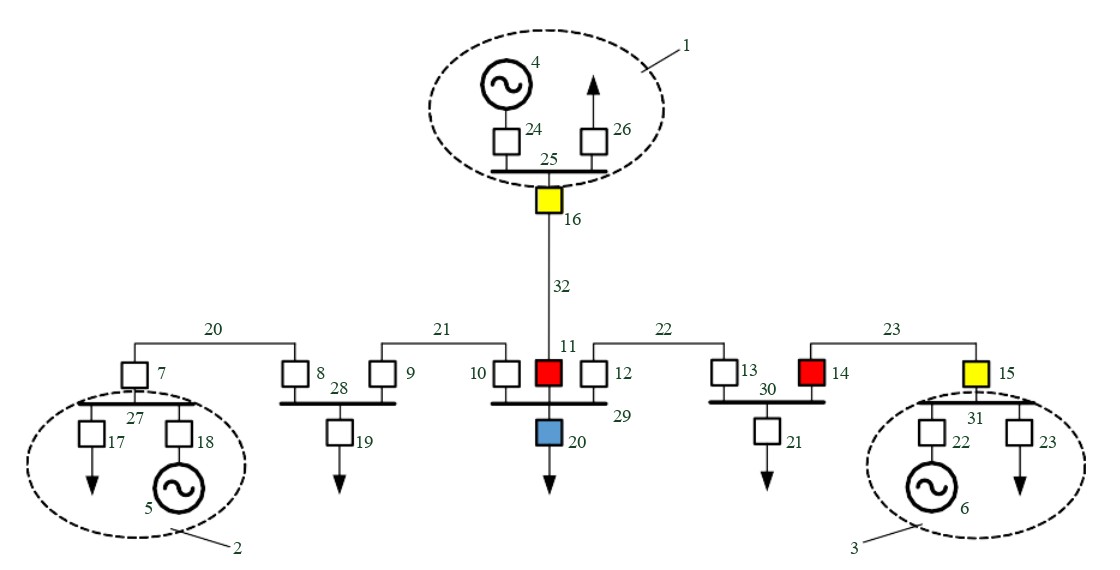
На (рис. 13) представлено коммутационное состояние схемы сети после последовательного срабатывания сетевых выключателей с нормальным напряжением с одной стороны выключателя в процессе восстановления нормального режима внутри синхронизированного такта времени (согласно варианту 1 распределения квантов времени их срабатывания в такте времени, представленного на (рис. 14)

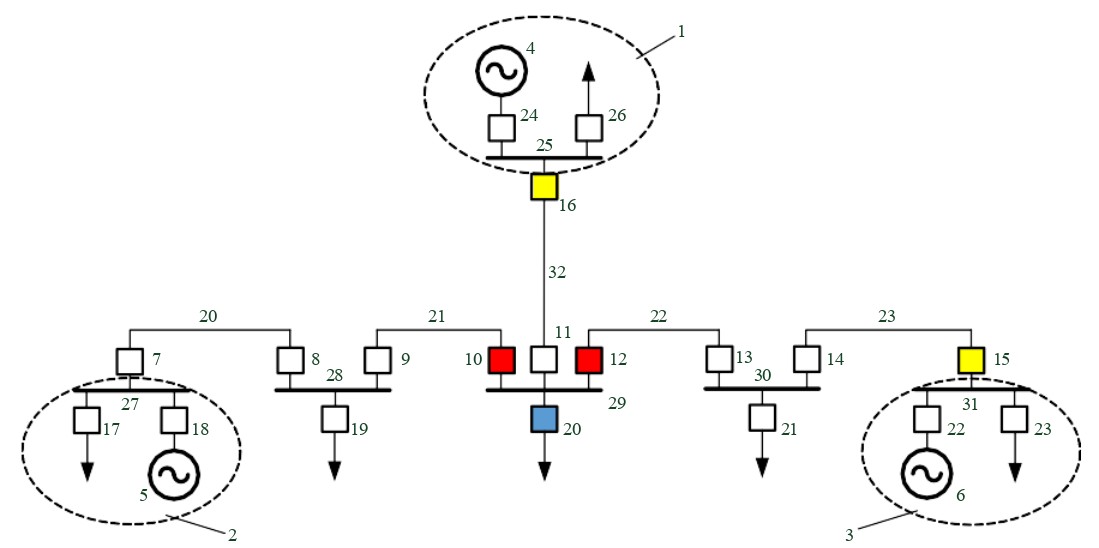
На (рис. 15) представлено коммутационное состояние схемы сети после последовательного срабатывания сетевых выключателей с нормальным напряжением с одной стороны выключателя в процессе восстановления нормального режима в такте времени (согласно варианту 2 распределения квантов времени их срабатывания, представленного на (рис. 16)).

На (рис. 17) представлена структура варианта 3 в двухтактовом процессе восстановления целостности и нормального режима электрической сети с указанием кванта времени для каждого сетевого выключателя.
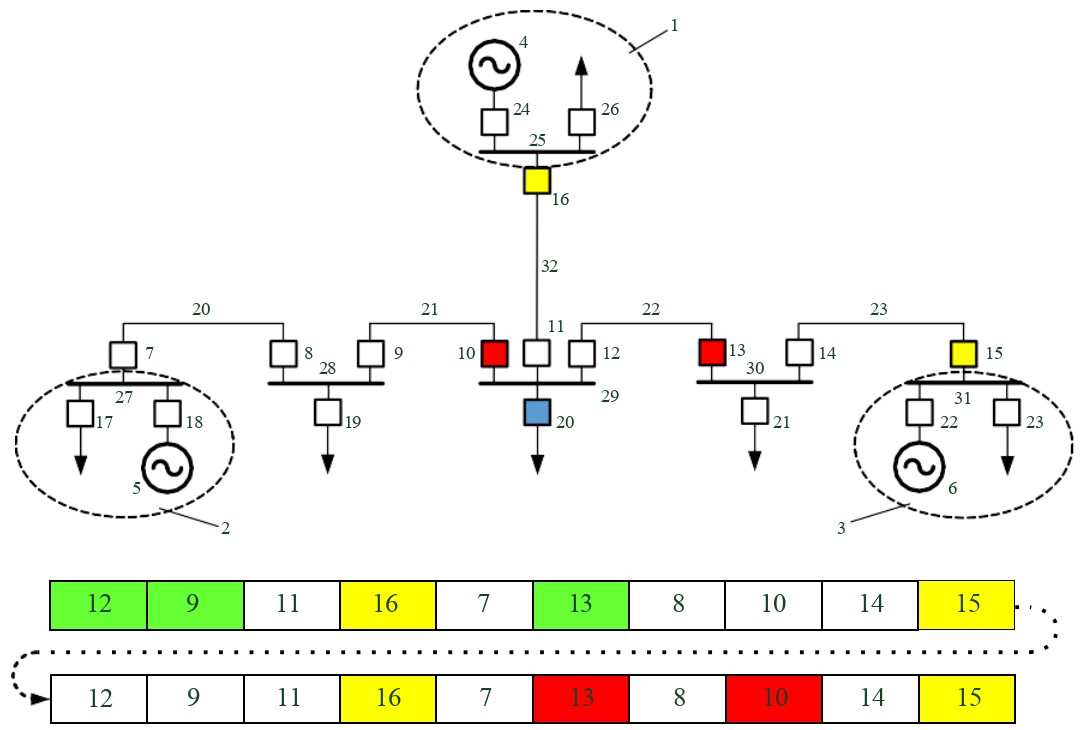
Схема электрической сети (рис. 12) содержит: 1,2,3 - районы электрической сети с генерацией, 4,5,6 - управляемые контроллерами генераторы, с выключателями 18,22,24, подключенными к шинам 26,27,31, 17,19,20,21,23,25 - выключатели фидеров нагрузки, подключенные к шинам 26,27,28,29,30,31, 7,8,9,10,11,12,13,14,15,16 - сетевые выключатели с улавливателями синхронизма, подключенные к шинам 26,27,28,29,30,31, 20,21,22,23,32 - линии электропередачи, связывающие через выключатели шины объектов электрической сети 26,27,28,29,30,31. Коммутационное состояние выключателей соответствует послеаварийному режиму с резделением сети на три активных части (1,2,3) и двумя пассивными (шины 28, 29) после отключения КЗ на фидере нагрузки за выключателем (20). Желтым цветом выделены сохранившее включенное состояние выключатели, синим – отключенные по факту снижения напряжения в результате возникновения КЗ.
На (рис. 13) белым цветом выделены включенные в последовательном процессе восстановления целосности сети сетевые выключатели с односторонним нормальным напряжением перед включением. Красным – выключатели с разрывом связей между активными частями сети, на которых включение возможно только с улавливанием синхронизма.
На всех схемах обозначены сетевые выключатели 7,8,9,10,11,12,13,14,15,16.
Зеленым цветом выделены выключатели, которые не включились в первом синхронизированном такте, т.к. в заданном распределении их квантов времени в первом синхронизированном такте на этих выключателях одностороннее напряжение не появилось.
Восстановление целостности сети осуществляется следующим образом:
В исходном нормальном режиме все выключатели схемы (рис. 12) включены. Генераторы 4,5,6 работают параллельно в общей сети. Все генераторы участвуют в
первичном регулировании частоты. Первый генератор осуществляет вторичное регулирование частоты.
При возникновении аварийного возмущения (коротком замыкании (КЗ) за выключателем 20), по факту снижения напряжения ниже уставки быстродействующими защитами отключается группа выключателей (8,9,10,11,12, рис. 12). Происходит разделение сети на три активных части (1,2,3) и две пассивных части (шины 28,29). Контроллеры генераторов (4,5,6) по факту снижения напряжения запускают согласованное низкочастотное (частоты для генераторов индивидуальны, например, 0.03, 0.02, 0.01 Гц) регулирование частоты (АРС) и напряжения (АРВ) в пределах допустимых диапазонов их изменения (Описание данного способа управления генерацией для обеспечения выполнения условий синхронизации на удаленных выключателях приводится ниже). Также по факту снижения напряжения котроллерам сетевых выключателей разрешается включение в синхронизированных тактах времени на интервалах своего кванта времени.
В первом такте времени (при варианте 1 распределения квантов времени их срабатывания в синхронизированном такте времени) последовательно включаются выключатели с односторонним напряжением 8 следом 9 следом 10. На выключателе 11 запускается улавливание выполнения условий синхронизации, т.к. напряжение появляется с двух сторон отключенного выключателя, далее включается 12 следом13. На выключателе 14 запускается улавливание выполнения условий синхронизации, т.к. напряжение появляется с двух сторон отключенного выключателя. После появления напряжения на шине 29 на 20 выключателе срабатывает его автоматическое повторное включение (АПВ), но, ввиду неустранившегося КЗ, выключатель отключается с ускорением, сохраняя включенное состояние остальных сетевых выключателей.
Далее, в результате согласованного низкочастотного регулирования частоты и напряжения в пределах допустимых диапазонов их изменения на генераторах 4,5,6 выполняются условия синхронизации, например, на выключателе 11. Происходит его включение, что приводит к возникновению параллельной работы генераторов 4,5 и проявления затухающего переходного электромеханического процесса в токах генераторов. По факту возникновения частоты электромеханического процесса в токе контроллеры генераторов 4,5 прекращают согласованное низкочастотное регулирование частоты и напряжения в пределах допустимых диапазонов их изменения и переводят регуляторы возбуждения и мощности в состояние регулирования нормального режима сети.
Далее, в результате согласованного низкочастотного регулирования частоты и напряжения в пределах допустимых диапазонов их изменения на генераторе 6 выполняются условия синхронизации на выключателе 14. Происходит его включение, что приводит к возникновению параллельной работы генераторов 4,5,6 и затухающего переходного электромеханического процесса в токе генератора 6. По факту возникновения частоты электромеханического процесса в токе контроллер генератора 6 прекращает согласованное низкочастотное регулирование частоты (АРС) и напряжения (АРВ) в пределах допустимых диапазонов их изменения и переводит регуляторы возбуждения и мощности в состояние регулирования нормального режима сети.
В данном примере, срабатывание всех сетевых выключателей с односторонним нормальным напряжением произошло в одном синхронизированном такте времени. При использовании, например, вакуумных выключателей со временем срабатывания на отключение и включение (с учетом времени срабатывания автоматики) 0.06 с квант времени при запасе по времени, например, 0.04 с составляет 0.06+0.06+0.04= 0.16 с, а длительность синхронизированного такта времени с учетом всех сетевых выключателей составит 10*0.16 = 1.6 с. Максимальное время синхронизации можно оценить, как половину наибольшего периода сканирования условий синхронизации. В примере ½*1/0.01 = 50 с.
Полное максимальное время восстановления целостности и нормального режима сети для вариантов 1 и 2 расположения квантов времени для сетевых выключателей внутри синхронизированного такта времени составит 50+0.16 = 50.16 с т.е. около одной минуты.
Для варианта 2 понадобилось 2 такта времени для выявления сетевых выключателей, т.к. в первом такте (верхний такт) не включались выключатели 10 и 9, но определился выключатель 12, на котором может произойти синхронизация с улавливанием синхронизма генераторов. Во втором такте включился выключатель 10, и определился второй выключатель для синхронизации (9).
Для варианта 3 также понадобилось 2 такта времени для выявления сетевых выключателей, на которых должна произойти синхронизация с улавливанием синхронизма, т.е. 2*1.6 = 3.2 с., однако это практически не сказывается на общем времени, т.к. включение выключателей происходит на начальной стадии сканирования, когда возникновение условий синхронизации еще невозможно. Варианты 2,3 приведены для доказательства того, что распределение квантов времени выключателей внутри синхронизированного такта может производиться произвольно и влияет лишь на количество необходимых для восстановления сети тактов времени при том или ином возмущении.
Таким образом, контроллеры коммутационных аппаратов генераторов, сетевых выключателей не взаимодействуют между собой, но совместно выполняют автоматическую децентрализованную синхронизацию генерирующих устройств и восстановление целостности и нормального режима электрической сети при ее исходном разделении на множество электрически изолированных частей с генераторами и при множественных отключениях выключателей в электрической сети на связях между разделенными активными частями сети. Необходимым условием успешности восстановления целостности сети при этом является эффективная синхронизация разделившихся частей.
6. Экспериментальное исследование способа синхронизации на физической модели
Описание экспериментальной установки
Экспериментальное подтверждение работоспособности технологии децентрализованной синхронизации проведено на базе электродинамической модели (ЭДМ) центра коллективного пользования «Центр испытаний устройств контроля и управления режимами электроэнергетических систем» при Новосибирском государственном техническом университете.
В качестве генерирующих установок (ГУ) использовались модельные синхронные машины (с первичным приводным двигателем постоянного тока) типа МТ-5-1500 (Г2) и МК-3-1500 (Г1). Параметры модельных генераторов (рис. 18) приведены в табл. 4.
Параметры модельных синхронных машин ЭДМ НГТУ
Параметр | Наименование параметра | Ед.изм. | Синхронные генераторы | |
|---|---|---|---|---|
МТ-5-1500 | МТ-3-1500 | |||
Sном | Полная мощность | кВА | 5 | 3 |
Uном | Номинальное напряжение | В | 230 | 230 |
Iном | Номинальный ток | А | 12,55 | 7,52 |
cos(φном) | Номинальный cosφ | - | 0,8 | 0,8 |
n | Номинальные обороты | Об/мин | 1500 | 1500 |
Таблица 4
Также, в эксперименте использованы модели линии электропередач ЛЭП-1 и ЛЭП- 2; выключатели В1-В3; активные нагрузки Н1 мощностью 900 Вт, и Н2 мощностью 450 Вт.
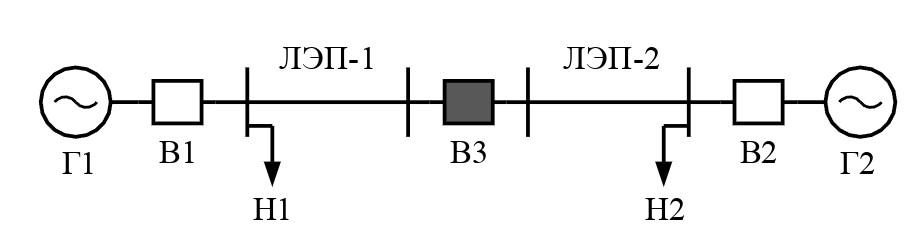
В эксперименте выключатели В1, В2 выполняли функцию генераторных выключателей, а выключатель В3 – синхронизирующего удаленного коммутационного аппарата.
В качестве блока управления для осуществления гармонизации и сканирования используется функциональный блок комплекса противоаварийной автоматики многофункциональный (КПА-М) [24]. КПА-М предназначен для выполнения функций устройств противоаварийной, технологической автоматики, релейной защиты и системной автоматики, устанавливаемых на электроэнергетических объектах.
Результаты эксперимента
На (рис. 19, 20) приведены осциллограммы, полученные при реализации предложенных алгоритмов (рис. 5, 6), в частности определения класса балансов мощности, гармонизации и сканирования режимных параметров разделенных частей сети.
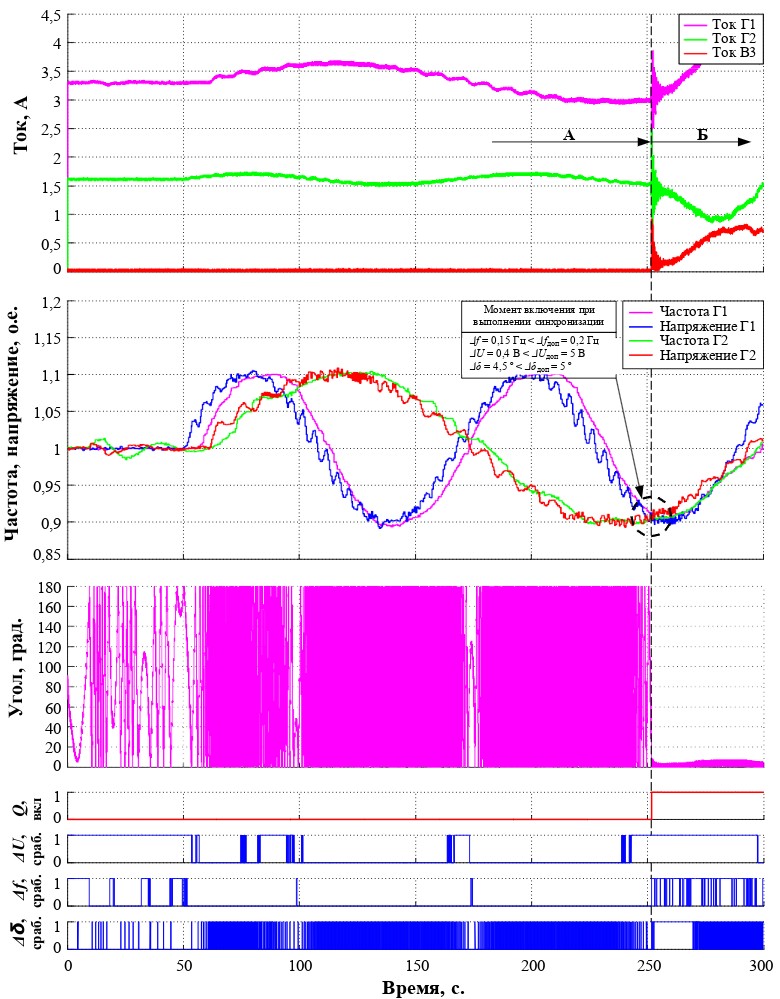
На (рис. 19) приведены осциллограммы процесса синхронизации, где в одной части сети генератором Г1 осуществлялась гармонизация и сканирование режимных параметров с периодом колебания 120 с, а в другой части гармонизация генератором Г2, с пониженными режимными параметрами (f = 48 Гц, U = 116 В). При пересечении режимных параметров двух частей и выполнении условий синхронизации происходило автоматическое включение выключателя В3. Признаками наступления параллельной работы могут служить изменения квазиустановившихся токов генераторов или возникновение их затухающих колебаний, соответствующих возникновению электромеханического переходного процесса при включении генераторов на параллельную работу.
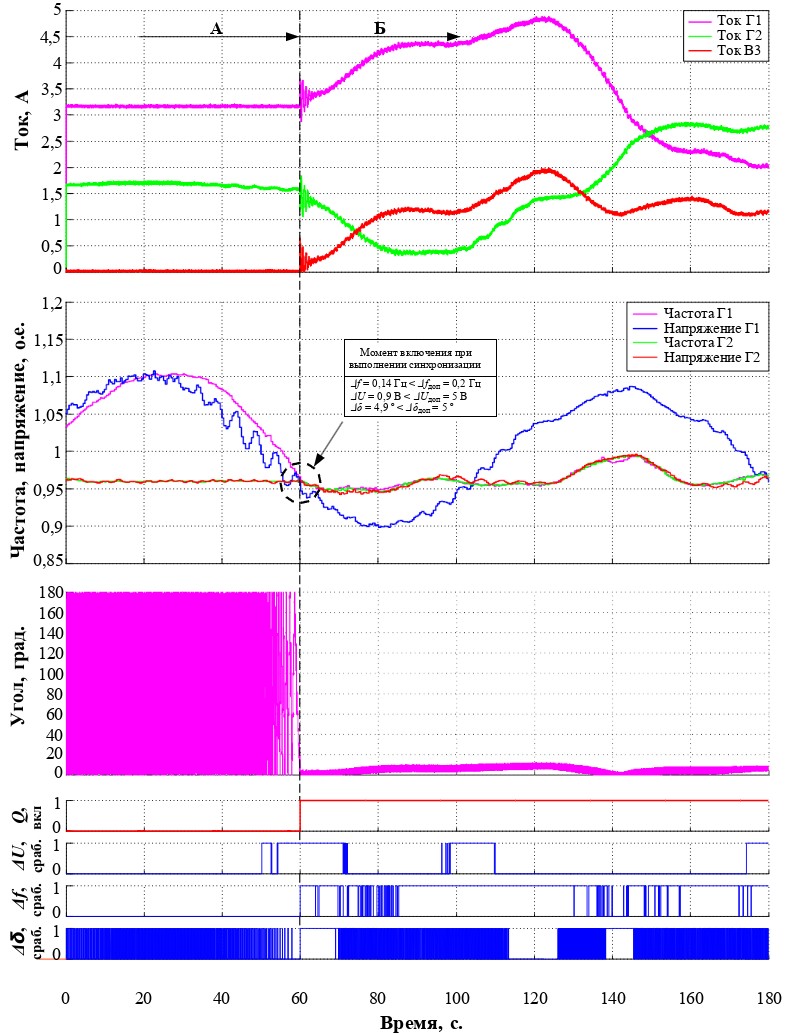
На (рис. 20) приведены осциллограммы процесса синхронизации, где режим сканирования выполнялся с разными частотами колебаний, т.е. в одной части сканирование режимных параметров осуществлялось генератором Г1 с периодом колебания 120 с, а в другой – генератором Г2 с периодом колебания 240 с. После успешного включения на параллельную работу оба генератора продолжали режим сканирования до заданного времени (3 мин).
А - режим сканирования условий синхронизации; Б – режим параллельной работы с продолжающимся сканированием
Таким образом, технология децентрализованной синхронизации на удаленных коммутационных аппаратах без использования передачи данных и команд телеуправления ими обеспечивает безопасное и успешное включение на параллельную работу разделенных активных частей сети.
В ходе проведения эксперимента на физической модели были получены реальные осциллограммы, доказывающие работоспособность теоретически обоснованных алгоритмов децентрализованной синхронизации. Важно отметить, что такое управление синхронизацией приводит к сокращению времени ожидания наступления синхронных условий, что повышает надежность электроснабжения потребителей.
7. Экспериментальное исследование мультиагентного управления распадом на части и восстановлением целостности и нормального режима электрической сети с распределенной генерацией на физической модели
Для проведения испытаний технологии на основе прототипов устройств автоматики децентрализованного восстановления нормального режима ЛИЭС на физической модели создавались схемно-режимные и аварийные ситуации, подобные тем, в которых испытуемое оборудование должно работать в реальных эксплуатационных условиях.
Для этого моделировалась электрическая сеть с тремя ЛИЭС малой мощности, представленными тремя работающими, как на местную нагрузку, так и параллельно друг другу генераторами (рис. 21). Обязательным условием является подключение ГУ между собой через линии связи, моделирующих их «удаленность», возможность управления 3-мя генераторными выключателями и 4-мя сетевыми выключателями (Q1-Q4).
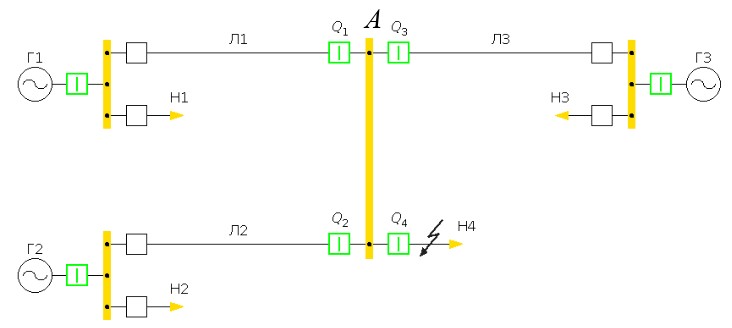
В процессе испытаний производилось:
- Запуск генераторов Г1-Г3, включение генераторных выключателей для питания местных нагрузок. На данном этапе все генераторы работают автономно, следовательно, контроллеры всех генераторов работают в режиме поддержания заданных уставками частоты и напряжения на шинах генераторах.
- Ввод в работу АПВ с улавливанием синхронизма выключателей Q1 - Q3. После синхронизации генераторов друг с другом необходимо перевести ГУ2 и ГУ3 в режим регулирования перетока мощности по сечению (исходная схема с нормальным режимом собрана).
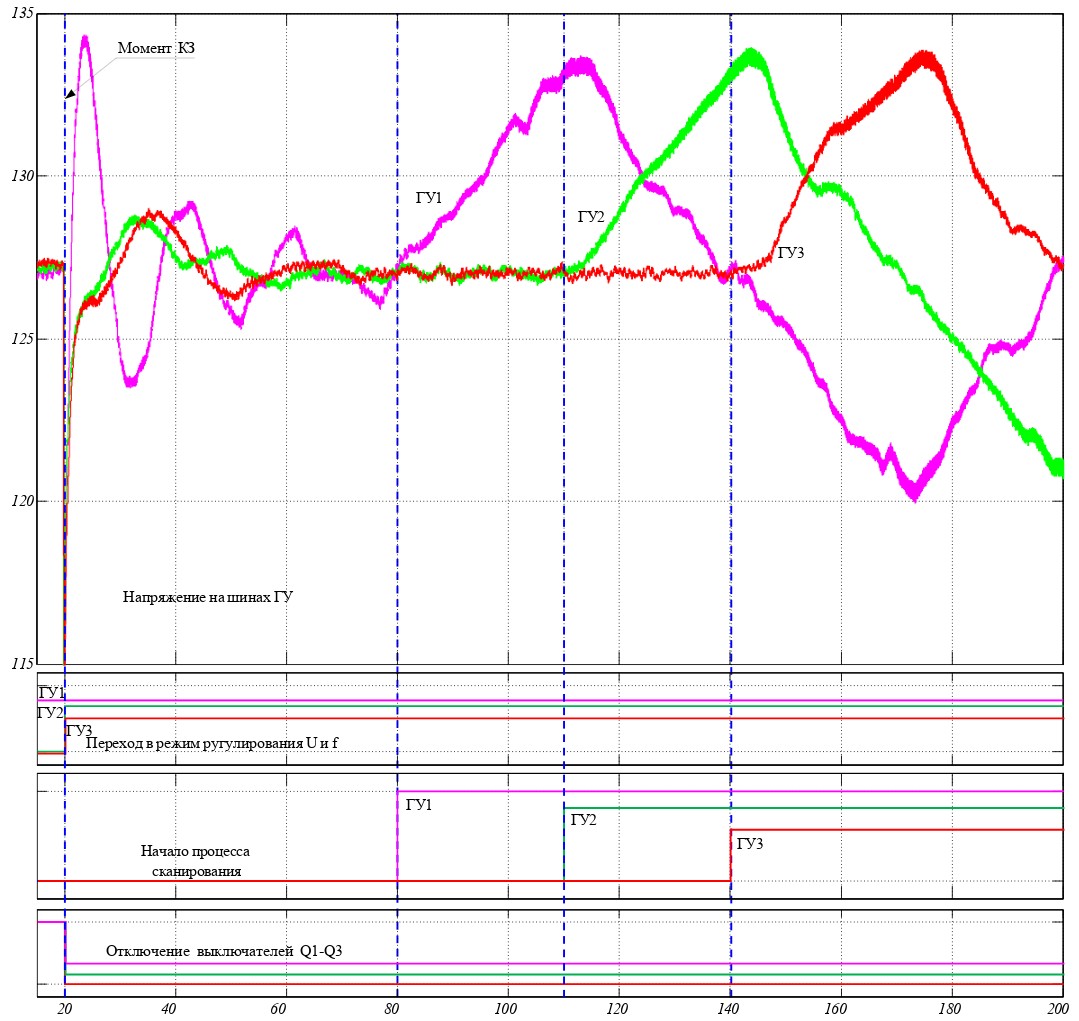
- Имитируется режим трехфазного КЗ путем ручного включения выключателя Q4 на закоротку. В результате такого возмущения встроенные защитные функции в устройствах АПВ должны отключить выключатели Q1 - Q3, генераторы ГУ2 и ГУ3 должны перейти в режим регулирования частоты и напряжения, и, через заданные выдержки времени (60, 90 и 120 с соответственно), начать процесс «сканирования» (выполнено успешно, рис. 22).
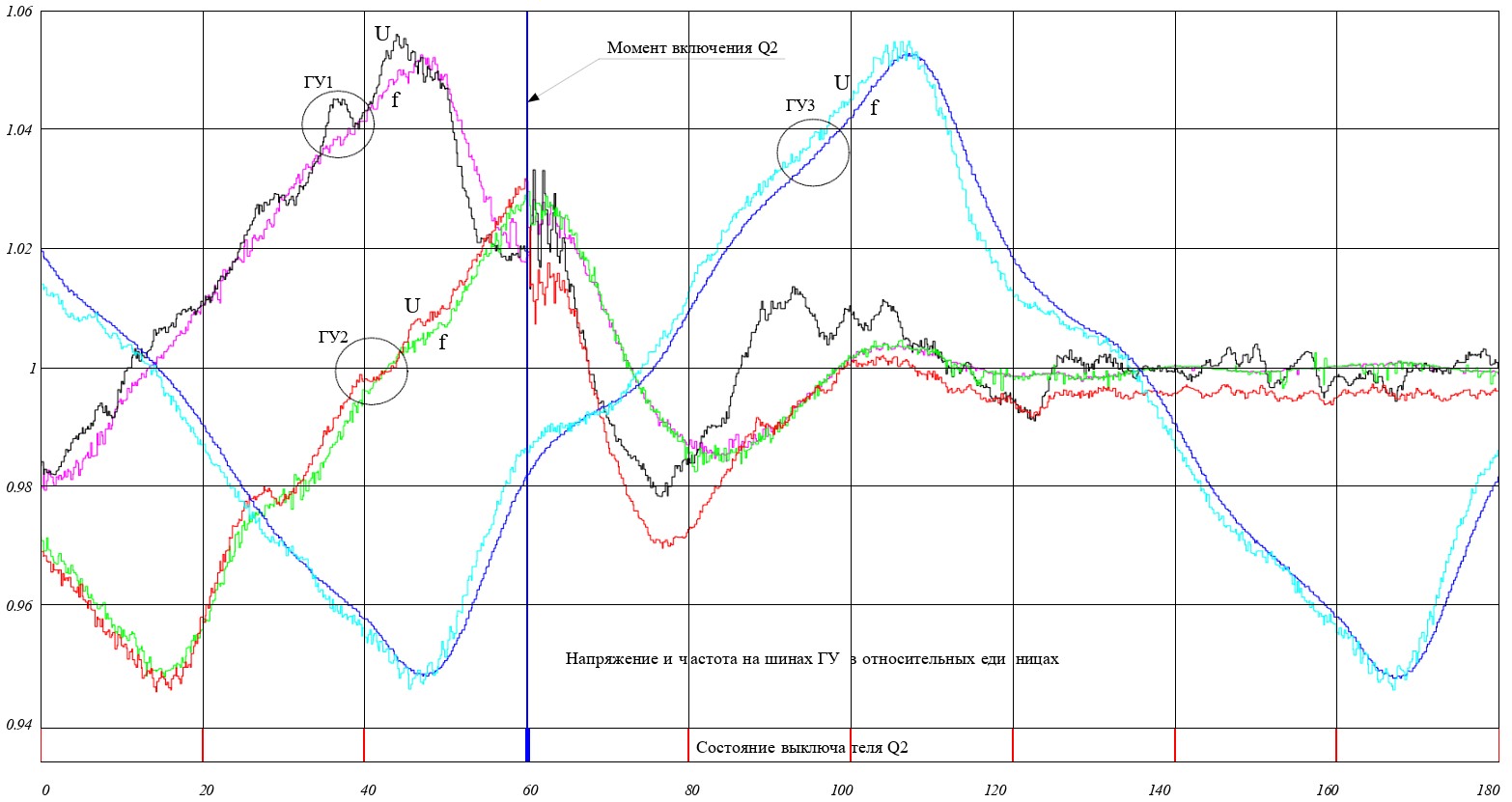
- После отключения КЗ должен включиться выключатель Q1, что приведет к появлению напряжения на шинах А (рис. 21). В процессе сканирования на выключателе (например) Q2 создаются условия для синхронизации, и он включается. Фиксируя электромеханический процесс ГУ1 и ГУ2 должны прекратить процесс сканирования и перейти в исходный режим регулирования: ГУ1 - режим вторичного регулирования частоты и напряжения, ГУ2 - в режим выдачи заданной мощности или поддержания заданного перетока по сечению. В таком режиме частота в объединенной сети поддерживается на уровне 50 Гц. ГУ3 продолжает процесс сканирования (выполнено успешно, рис. 23).
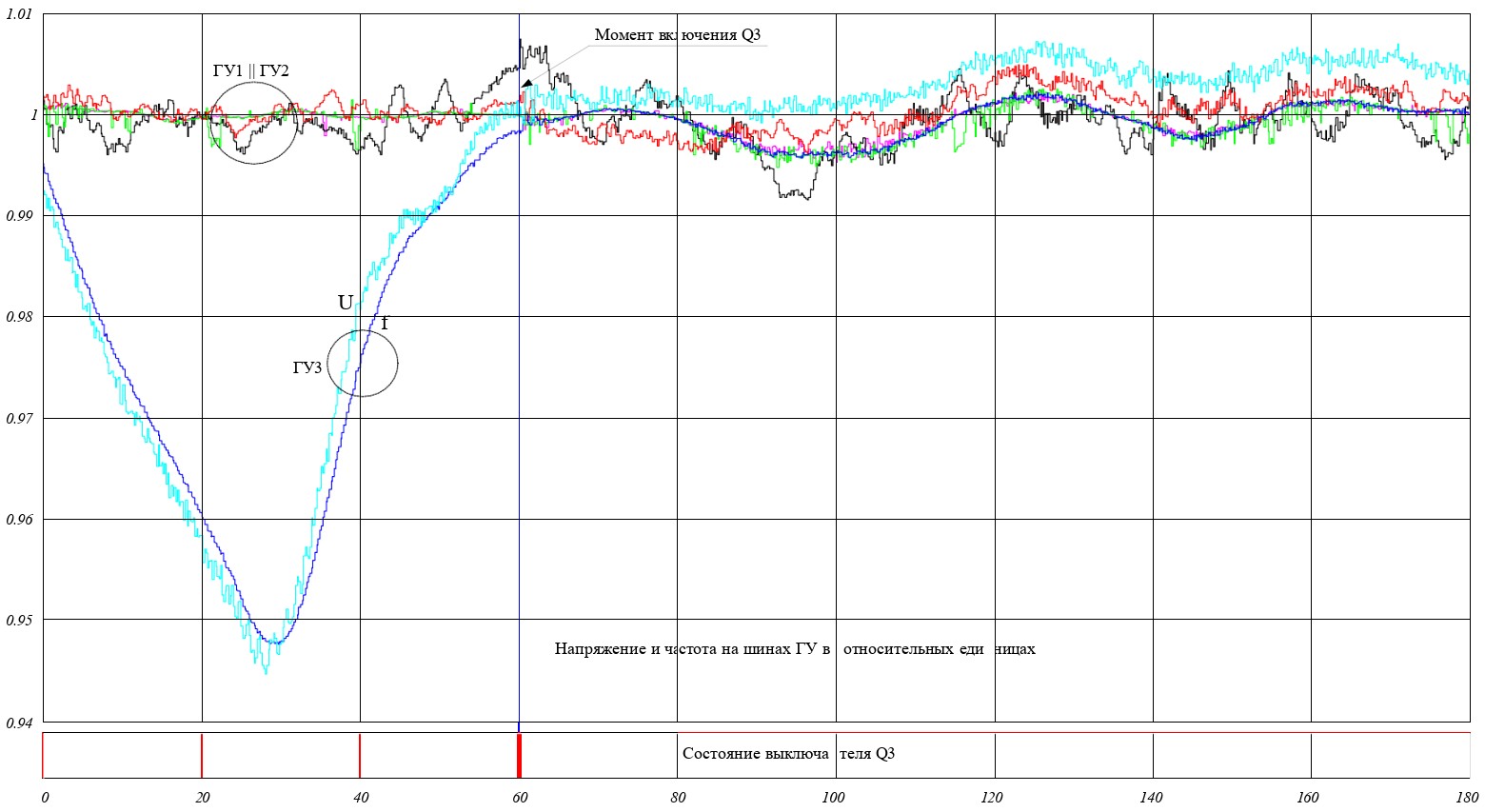
- В дальнейшем, в процессе сканирования ГУ3 создаются условия синхронизации на выключателе Q3, и он включается. Фиксируя электромеханический процесс ГУ3 должен прекратить процесс сканирования и перейти в исходный режим регулирования - режим поддержания заданной мощности или перетока мощности по сечению. Автоматическое восстановление нормального режима работы сети выполнено. (выполнено успешно, рис. 24).
Заключение
Развитие распределенной по сети малой генерации и объектов на ее основе нуждается в создании децентрализованной системы управления режимами такой сети, в т.ч. источниками активной и реактивной мощности, входящими в ее состав. Независимые системы управления объектами такой сети, по сути становятся агентами некоторой мультиагентной системы, осуществляющими согласованное управление общим режимом
Представленная Мультиагентная система управления является системой распределенного искусственного интеллекта экспертного типа с центрами принятия решений по общим правилам.
Результаты работы свидетельствуют как о принципиальной возможности децентрализованного управления такими сетями, так и о возможности создания одноуровневой мультиагентной системы управления, т.е. системы без координирующих центров.
Список литературы
- Фишов А.Г. Технические и экономические аспекты создания минигридов и их интеграции с централизованным энергоснабжением // Энергетик. 2022. №4. C. 27-34.
- Гежа Е.Н., Глазырин В.Е., Глазырин Г.Е., Ивкин Е.С., Марченко А.И., Семендяев Р.Ю., Сердюков О.В., Фишов А.Г. Cистемная автоматика для интеграции локальных систем электроснабжения с синхронной малой генерацией в электрические сети // Релейщик, № 02(32)2018, с.24-31.
- ГОСТ Р 55890-2013 Национальный стандарт российской федерации. Единая энергетическая система и изолированно работающие энергосистемы. Оперативно- диспетчерское управление. Регулирование частоты и перетоков активной мощности. Нормы и требования.
- Operation hand вook UCTE/ UCTE OH – Policy 1: Load – Frequency Control – Final version (approved by SC jn 19 March 2009) B. Secondary Control.
- Fishov A.G, Karjaubayev N.A., Klavsuts I.L., Klavsuts D.A. Decentralized Smart Multi- Agent Voltage Regulation in Electric Grids. Ideology and Modeling // 53rd International Universities Power Engineering Conference (UPEC 2018): proc., Glasgow, United Kingdom, 4-7 Sept. 2018. - IEEE, ISBN 978-1-5386-2910-9. - DOI: 10.1109/UPEC.2018.8542109.
- Карджаубаев Н.А., Фишов А.Г. Децентрализованное мультиагентное регулирование напряжения в электрических сетях // Вестник Иркутского государственного технического университета. 2018. Т. 22. № 6. С. 183–195.
- Фишов А.Г., Денисов В.В., Кобец Б.Б. Способ регулирования напряжения узла электрической сети // Патент SU 1372465 A1, 08.07.1993. Заявка № 3937357 от 01.08.1985.
- Фишов А.Г., Исмоилов С.Т. Способ регулирования напряжения узла электрической сети и узлов, примыкающих к нему // Патент на изобретение RU 2561915 C1, 10.09.2015 .
- Мукатов Б.Б., Карджаубаев Н.А., Фишов А.Г. Особенности обеспечения надежности электроснабжения в изолированно работающих энергосистемах с малой генерацией // Доклады Академии наук высшей школы Российской Федерации. - 2015.- 4 (29). - С. 94 - 104. DOI: 10.17212/1727-2769-2015-4-94-104.
- Fishov A.G., Karjaubayev N.A., Erdenebat E. Multi-agent voltage control in multiconnected electric networks // 12 International forum on strategic technology (IFOST 2017) : proc., Korea, Ulsan, 31 May - 2 June 2017. - Ulsan, 2017. - Vol.1. - P. 246-250. - ISBN 978-1-5090- 5703-0.
- Фишов А.Г., Мукатов Б.Б., Ефремов И.А. Исследование реконфигурации электрических сетей с распределенной генерацией в аварийных режимах // Доклады Академии наук высшей школы Российской Федерации, 2014. - № 4 (25). - С. 90-103.
- Фишов А.Г., Мукатов Б.Б., Марченко А.И. Способ противоаварийного управления режимом параллельной работы синхронных генераторов в электрических сетях // Патент на изобретение RU 2662728 C2, 30.07.2018
- Азорин А.Ю. Автоматическая синхронизация "Островов" при восстановлении систем электроснабжения с распределенной генерацией // Вестник Иркутского государственного технического университета. 2018. Vol. 22, № 8. P. 83–94.
- Фишов А.Г., Гуломзода А.Х. Способ удаленной синхронизации и восстановления нормального режима аварийно разделенной электрической сети с генераторами: pat. № 2752693 USA. РФ: Опубл. бюл. № 22, 30.07.2021.
- Фишов А.Г. et al. Синхронизация Microgrid с внешней электрической сетью и между собой в нормальных и послеаварийных режимах при разных схемах объединения // Релейная защита и автоматизация. 2021. Vol. 2 (43). P. 32–42.
- Bellini A., Bifaretti S., Giannini F. A Robust Synchronization Method for Centralized Microgrids // IEEE Trans. Ind. Appl. 2015. Vol. 51, № 2. P. 1602 - 1609.
- Laaksonen H., Kauhaniemi K. Synchronized re-connection of island operated LV microgrid back to utility grid // 2010 IEEE PES Innovative Smart Grid Technologies Conference Europe (ISGT Europe). IEEE, 2010. P. 1-;8.
- Choi K.-Y. et al. Selective frequency synchronization technique for fast grid connection of islanded microgrid using prediction method // Int. J. Electr. Power Energy Syst. 2019. Vol. 111. P. 114–124.
- Shah S. et al. VSC-Based Active Synchronizer for Generators // IEEE Trans. Energy Convers. 2018. Vol. 33, № 1. P. 116 - 125.
- Cho C. et al. Active Synchronizing Control of a Microgrid // IEEE Trans. Power Electron. 2011. Vol. 26, № 12. P. 3707 - 3719.
- Chen Z. et al. A synchronization control method for micro-grid with droop control // 2015 IEEE Energy Conversion Congress and Exposition (ECCE). IEEE, 2015. P. 519 - 524.
- Balaguer I.J. et al. Control for Grid-Connected and Intentional Islanding Operations of Distributed Power Generation // IEEE Trans. Ind. Electron. 2011. Vol. 58, № 1. P. 147 - 157.
- Litwin M., Zielinski D., Gopakumar K. Remote Micro-Grid Synchronization Without Measurements at the Point of Common Coupling // IEEE Access. 2020. Vol. 8. P. 212753- 212764.
- Комплекс противоаварийной автоматики многофункциональный [Electronic resource]. URL: http://www.iaes.ru/устройства/ (accessed: 14.03.2022).
[08.08.2022]
Авторы:
Фишов Александр Георгиевич
- Доктор технических наук, профессор, профессор кафедры Автоматизированных электроэнергетических систем Новосибирского государственного технического университета.

Осинцев Анатолий Анатольевич
- Кандидат технических наук, доцент, доцент кафедры Электрических станций Новосибирского государственного технического университета

Какоша Юрий Васильевич
- Аспирант кафедры Автоматизированных электроэнергетических систем Новосибирского государственного технического университета

Одинабеков Мухаммаджон Завкибекович
- Магистрант кафедры Автоматизированных электроэнергетических систем Новосибирского государственного технического университета